Принцип эхолотирования скважины
Устройство и основные принципы работы эхолота
Люди занимаются рыболовством уже тысячи лет. Перед всеми, кто удит рыбу, стоит одна и та же задача – найти рыбу и сделать так, чтобы она клюнула на наживку. Эхолот, конечно, рыбу за вас не поймает, зато поможет ее найти.
Принцип действия
Эхолот по-английски «sonar». Этот термин является сокращением от словосочетания «SOund» (звук), «NAvigation» (навигация) and Ranging (определение расстояния)». Эхолоты были созданы как средство слежения за субмаринами во время Второй мировой войны. Эхолот состоит из передатчика, преобразователя, приемника и экрана.
Вкратце работу эхолота можно описать так. Электрический импульс от передатчика преобразуется преобразователем в звуковую волну и посылается в воду. Если эта волна ударяется о какой-то предмет, она отражается. Эхо попадает в преобразователь, который преобразует его обратно в электрический сигнал, усиливаемый приемником и подаваемый на экран. Поскольку скорость звука в воде является величиной постоянной (около 1,575 км/сек), то, замерив промежуток времени между передачей сигнала и получением эхо, можно вычислить расстояние до предмета. Этот процесс повторяется много раз в секунду.
Наиболее часто в эхолотах используется частота 192-200 кГц, однако в некоторых моделях применяется частота 50 кГц. Хотя эти частоты находятся в пределах звукового спектра, ни человек, ни рыба их не ощущают (поэтому не волнуйтесь, что эхолот вспугнет вам рыбу – она его просто не услышит).
Как сказано выше, эхолот посылает и принимает сигналы, затем «отражает» эхо на экране. Поскольку это происходит много раз в секунду, на экране эхо представляется в виде непрерывной линии, отображающей сигнал, поступающий со дна. Помимо него, на экране отображаются эхосигналы от всех встретившихся ну пути объектов между поверхностью воды и дном. Зная скорость прохождения звука в воде (около 1,575 км/сек) и время, требующееся для приема эхо, прибор может вычислить глубину воды и определить наличие в ней рыбы.
Работа системы в целом
Высококачественный эхолот состоит из четырех базовых компонентов:
• мощного передатчика;
• эффективного преобразователя;
• чувствительного приемника;
• экрана с высоким разрешением и контрастностью.
Все части системы должны быть сконструированы в расчете на совместную эксплуатацию при любых погодных условиях и экстремальных температурах.
Высокая мощность передатчика увеличивает вероятность того, что вы получите ответное эхо в глубокой воде и при плохой погоде. Она позволит вам различить мелкие детали, например, мелкую рыбешку и подводные предметы.
Преобразователь должен не только справляться с высокой нагрузкой от передатчика, но и преобразовывать электрическую энергию в звуковую с минимальными потерями в силе сигнала. С другой стороны, преобразователь обязан «слышать» слабейшие эхо, отражающиеся от глубин и мельчайшей рыбешки.
Приемнику также приходится иметь дело с очень широким диапазоном сигналов. Он ослабляет слишком сильный сигнал от передатчика и усиливает слабые сигналы, поступающие от преобразователя. Кроме того, он различает оказывающиеся слишком близко к друг другу объекты и показывает их в виде индивидуальных импульсов на экране.
Экран должен иметь высокое разрешение (вертикальные пиксели) и высокую контрастность, чтобы картинка на нем была четкой и детальной (например, чтобы можно было различать дугообразные сигналы от рыб и разные мелкие объекты).
Частота
В большинстве эхолотов в настоящее время используется частота 192-200кГц, и лишь некоторые работают на частоте 50 кГц.
У каждой из этих частот есть свои преимущества, однако почти во всех случаях в пресной воде и в большинстве случаев в соленой воде используют диапазон от 192 до 200 кГц. Он обеспечивает наивысшую детальность, лучше всего работает в мелководье и когда судно на ходу, дает меньше шумов и лишних эхо. Кроме того, на более высоких частотах выше разрешение объекта. Например, две плывущие рядом рыбины будут отображены на экране как два отдельных объекта, а не как одно сплошное «пятно».
В некоторых случаях оптимальной является частота 50 кГц. Как правило, эхолот с рабочей частотой 50 кГц (при равных условиях и мощности) способен проникать на бóльшие глубины, нежели эхолоты, работающие на более высоких частотах. Это связано с естественной способностью воды поглощать звуковые волны. Звуки более высокой частоты поглощаются быстрее, чем звуки более низкой частоты. Поэтому в более глубоких водах обычно применяются преобразователи 50 кГц. Кроме того, у преобразователей, работающих на 50 кГц, как правило, шире угол охвата, чем у их «коллег», работающих на 192 и 200 кГц. Благодаря этой особенности их удобно применять для слежения за составными даунриггерами, даже на относительном мелководье, поэтому многие рыбаки предпочитают частоту 50 кГц.
Предлагаем вашему вниманию сводную таблицу различий между эхолотами, работающими на указанных выше частотах:
192 и 200 кГц
• меньшие глубины
• узкий угол излучения
• лучше разрешение и различение цели
• меньшая восприимчивость к шумам
50 кГц
• бóльшие глубины
• широкий угол излучения
• хуже разрешение и различение цели
• более высокая восприимчивость к шумам
Преобразователи
Преобразователь выполняет функцию антенны эхолота. Он преобразует электроэнергию от передатчика в звуковой сигнал высокой частоты. Звуковая волна от преобразователя проходит сквозь воду и отражается от находящегося в воде объекта. Когда до преобразователя докатывается ответное эхо, он преобразует звук обратно в электрический сигнал, который посылается на приемник эхолота. Частота преобразователя должна совпадать с частотой эхолота. Другими словами, нельзя использовать преобразователь 50 кГц и даже 200 кГц вместе с эхолотом, рассчитанным на 192 кГц. Преобразователь должен выдерживать мощные импульсы передатчика, преобразовывая как можно большую часть импульса в звуковую энергию. В то же время, он должен быть достаточно чувствительным, чтобы принимать тишайшие эхо. Все это должно происходить на нужной частоте, а эхо на других частотах должны отбрасываться. В общем, преобразователь должен быть очень умелым.
Кристалл
В качестве активного элемента в преобразователе используется искусственный кристал (цирконат свинца или титанат бария). В процессе изготовления химические вещества смешивают и заливают в формы, которые ставят в печь, где химические компоненты превращаются в отвердевшие кристаллы. После охлаждения на обе стороны кристалла наносится проводящее покрытие. К нему привариваются проводки, чтобы кристаллы можно было подсоединить к кабелю преобразователя. От формы кристалла зависит и его частота, и угол его излучения. У круглых кристаллов (используемых в большинстве эхолотов) частота зависит от толщины кристалла, а от его диаметра зависит угол излучения или угол охвата (см. раздел, «Углы излучения»). Например, при частоте 192 кГц кристалл с углом излучения 20° имеет диаметр примерно 2,5см, в то время как для излучения 8° требуется кристалл диаметром приблизительно 5,1см. Все логично. Чем больше диаметр кристалла, тем меньше угол излучения. Именно поэтому преобразователь с углом излучения 20° намного меньше преобразователя с углом излучения 8°, при одинаковой рабочей частоте.
Корпус
Корпуса преобразователей бывают любых форм и размеров. Большинство из них изготавливаются из пластика, однако некоторые из преобразователей, рассчитанных на монтаж в корпус судна, изготавливаются из бронзы. Как мы уже говорили, размер кристалла определяет частоту и угол излучения. В свою очередь, размеры корпуса преобразователя зависят от размеров расположенного в нем кристалла.
В настоящее время существует четыре основных типа корпуса преобразователя. Это [1] сквозные корпуса (монтируются сквозь корпус судна), [2] корпуса, прикрепляемые к внутренней стенке корпуса судна, [3] переносные и [4] монтируемые на транце.
Преобразователи со сквозным корпусом вставляются в отверстие, просверленное в корпусе судна. Как правило, они снабжены длинным штоком, который пропускают сквозь корпус и закрепляют гайкой соответствующего размера. У плоскодонок монтаж этим и ограничивается. Для вертикальной установки преобразователя по борту судна, имеющего корпус V-образной формы, понадобится деревянный или пластмассовый обтекатель. Сквозные преобразователи обычно устанавливают на судах со стационарным двигателем, впереди рулей, гребных винтов и валов.
Преобразователи с корпусами второго типа приклеиваются эпоксидной смолой непосредственно к внутренней стенке стекловолоконного корпуса судна. Звук передается и принимается сквозь корпус судна, при этом работа эхолота становится менее эффективной (глубина действия эхолота будет ниже, чем у эхолота, установленного на транце). Корпус судна должен быть выполнен из твердого стекловолокна. Даже не пытайтесь «пробить» лучами эхолота корпус из алюминия, дерева или стали. Звук не проходит сквозь воздух, поэтому если корпус судна изнутри укреплен конструкцией из дерева, металла или пенопласта, перед установкой эхолота ее придется демонтировать. Еще один недостаток эхолота данного типа заключается в том, что его нельзя оптимально настроить на дугообразные сигналы рыб. Впрочем, наряду с недостатками есть и существенные преимущества. Во-первых, его не поломает корягой или камнем, т.к. он расположен внутри судна. Во-вторых, он, не выступая из корпуса судна и не препятствуя течению, и будучи установлен там, где поток воды плавно обтекает корпус, довольно хорошо, как правило, работает при больших скоростях хода судна. В третьих, он не обрастет.
Переносные преобразователи, как видно из их названия, крепятся к корпусу судна временно. Обычно их крепят при помощи одной или несколько присосок. Некоторые переносные преобразователи могут крепиться и к электродвигателю для троллинга.
Транцевые преобразователи крепятся на транце судна и находятся в воде, немного ниже днища судна. Среди перечисленных выше четырех типов транцевые преобразователи по популярности лидируют с большим отрывом. Транцевый преобразователь с тщательно продуманной конструкцией будет работать на любом судне (кроме судов со стационарным двигателем), в том числе при высокой скорости хода судна.
Эксплуатация преобразователя на скорости
Годы назад, когда эхолоты для спортивного рыболовства только появились, бóльшая часть рыбачьих судов представляла собой мелкие лодки с подвесными моторами. По-настоящему мощный подвесной мотор развивал 50 л.с., при этом уже тогда большинство эхолотов были переносными, и их было несложно переставлять с лодки на лодку. Это преимущество считалось важнее способности работать на высокой скорости. Тем не менее, по мере совершенствования лодок, все больше людей хотели иметь на борту стационарный эхолот, способный действовать на скоростях, развиваемых лодкой. В связи с этим началась работа над созданием преобразователя, нормально функционирующего независимо от скорости судна.
Серьезным препятствием для работы эхолота на высоких скоростях является кавитация. Если поток воды вокруг преобразователя равномерен, преобразователь без проблем посылает и принимает сигналы. Если же поток воды «вздыбливается» под воздействием непогоды или кромок судна, он становится турбулентным настолько, что воздух отделяется от воды в виде пузырьков. Это явление называется кавитацией. Если над преобразователем (в котором расположен кристалл) проносятся пузырьки воздуха, на экране эхолота отображается «шум». Дело в том, что эхолот предназначен для работы в воде, а не в воздухе. Если же над преобразователем проносятся пузырьки воздуха, сигнал преобразователя отражается от пузырьков обратно на преобразователь. Поскольку воздух граничит с преобразователем, эти отражения очень сильны. Они создают помеху более сильным сигналам, отражающимся от дна, подводных объектов, рыб, из-за чего их становится трудно или невозможно различить.
Для решения данной проблемы преобразователю нужен корпус, который вода бы обтекала, не создавая турбулентности. Это достаточно сложно из-за множества требований, предъявляемых к современному преобразователю. Он должен быть компактным, чтобы не мешать подвесному мотору и не препятствовать потоку воды за ним. Он должен быть прост в установке на транце, чтобы при монтаже можно было обойтись минимумом отверстий. Он должен «уметь» откидываться, чтобы избегать повреждений при столкновении с какими-либо предметами.
Проблема кавитации не ограничивается формой преобразователя. Корпуса многих судов сами способствуют образованию пузырьков воздуха, которые создают завесу над лицевой частью установленного на транце преобразователя. Эта проблема особенно актуальна для алюминиевых лодок, из-за сотен выступающих из корпуса заклепок, каждая из которых образует свой собственный поток пузырьков, особенно при движении лодки на высокой скорости. Во избежание этой проблемы нужно установить лицевую часть преобразователь таким образом, чтобы поток пузырьков воздуха проходил над ней. Иными словами, кронштейн преобразователя необходимо установить как можно ниже по транцу.
Углы излучения преобразователя
Преобразователь фокусирует звук в луч. Чем дальше вглубь идет звуковой импульс, испускаемый излучателем, тем шире его охват. Если бы вы изобразили его на листе миллиметровки, вы бы увидели, что он образует конус, поэтому угол излучения еще называют углом конуса. Звуковой сигнал наиболее силен вдоль центровой линии (оси) конуса, постепенно ослабевая по мере удаления от центра.
Чтобы измерить угол излучения преобразователя, мощность излучения замеряют в центре или на оси конуса, затем сравнивают с мощностью по мере удаления от центра. Когда мощность падает наполовину (-3 дБ), измеряют угол относительно оси. Угол в диапазоне от –3дБ с одной стороны оси до –3 дБ с другой стороны оси называют углом излучения (конуса).
Отметка половинной мощности –3 дБ считается стандартной в электронной промышленности, и большинство производителей измеряют угол излучения именно таким образом, хотя некоторые берут за основу отметку –10 дБ, где мощность излучения составляет 1/10 от мощности, имеющей место на оси. Угол получается более широким, поскольку замер производится в точке, расположенной гораздо дальше от оси. Эффективность работы преобразователя остается прежней, немного отличается лишь метод измерения. К примеру, на отметке – 3 дБ угол излучения преобразователя составляет 8°, а на отметке –10 дБ он составляет 16°.
Устройства с более широким лучом помогут вам увидеть более широкую картину подводного мира, но за счет уменьшения глубины проникновения луча, поскольку мощность передатчика направляется вширь, а не вглубь. Узкоугольный преобразователь не даст вам такого полного представления о том, что творится вокруг, как широкоугольный, однако позволит вам заглянуть значительно глубже. Дело в том, что узконаправленный преобразователь концентрирует мощь передатчика на меньшем участке. У эхолота с широкоугольным преобразователем сигнал, отражающийся от дна, на экране шире, чем у эхолота с узкоугольным преобразователем, поскольку вы наблюдаете более широкий участок дна. Зона охвата широкого угла излучения намного больше, чем зона охвата узкого угла излучения.
Высокочастотные преобразователи (192 кГц) бывают как узкоугольными, так и широкоугольными. В пресной воде, как правило, используются «широкоугольники», тогда как для соленой воды подходят только узкоугольные эхолоты. У низкочастотных эхолотов (50 кГц) широта угла излучения варьируется от 30 до 45 градусов. Хотя преобразователь наиболее чувствителен в пределах собственного угла излучения, до вас будут доходить и некоторые эхосигналы из-за этих пределов, правда, не такие сильные.
Состояние воды и дна
От типа воды, в которой эксплуатируется эхолот, в немалой степени зависит его эффективность. Звуковые волны легко перемещаются в прозрачной пресной воде, и в большинстве озер так и происходит.
В соленой воде звук поглощается и отражается взвешенными веществами. Наиболее восприимчивыми к рассеиванию звуковых волн оказываются более высокие частоты, которые не в состоянии проходить сквозь соленую воду так же хорошо, как более низкие. Отчасти, проблема эксплуатации в соленой воде состоит в том, что это крайне динамичная среда (фактически, мировой океан). Ветер и течения постоянно перемешивают в ней воду. Под действием волн в воде образуются и перемешиваются пузырьки воздуха, рассеивающие сигнал эхолота. Микроорганизмы, типа водорослей и планктона, рассеивают и поглощают сигнал эхолота. То же самое делают и находящиеся в воде минеральные вещества и соли. На пресную воду тоже воздействуют ветры, течения и живущие в ней микроорганизмы, но все таки меньше, чем на соленую.
Ил, песок, растительность на дне поглощают и рассеивают сигнал эхолота, ослабляя ответное эхо. Камень, сланец, кораллы и другие твердые предметы хорошо отражают сигнал эхолота. Вы увидите разницу, взглянув на экран. Мягкое, илистое дно отображается на нем в виде тонкой линии, а твердое, каменистое дно отображается в виде широкой полосы.
Работу эхолота можно сравнить с поведением света от фонаря в темной комнате. Когда свет перемещается по комнате, он хорошо отражается от белых стен и ярких твердых предметов, однако если направить фонарь в покрытый темным ковром пол, отражение будет слабее, поскольку ковер поглощает свет, а шероховатая текстура рассеивает его, из-за чего к вам возвращается меньше света.
Температура воды и термоклины
Температура воды оказывает существенное влияние на жизнедеятельность рыб. Рыба хладнокровна, и температура ее тела всегда совпадает с температурой окружающей ее воды. Зимой в холодной воде обмен веществ рыбы замедляется. В этот период ей требуется примерно в четыре раза меньше пищи, чем летом. Большинство рыб не мечут икру, если температура воды не находится в каком-то довольно узком диапазоне. Встроенные во многие наши эхолоты датчики температуры поверхности воды помогают определить температуры верхних слоев воды, являющиеся наиболее благоприятными для метания икры различными породами рыб. К примеру, форель погибает в реках, вода в которых становится слишком теплой. Окунь и другие породы рыб в конце концов погибают, если скапливаются в озерах, вода в которых летом недостаточно прогревается. И хотя некоторые рыбы восприимчивы к перепаду температур меньше, чем другие, у каждой породы есть свой определенный температурный диапазон, в границах которого она пытается оставаться. Собирающуюся у поверхности воды рыбу на глубоких участках привлекает именно благоприятная для них температура. Мы полагаем, что там она чувствует себя наиболее комфортно.
В озерах температура в пространстве между поверхностью и дном редко бывает одинаковой. Как правило, за более теплым слоем воды следует более холодный. Граница между двумя слоями называется термоклином. Глубина и толщина термоклина могут меняться в зависимости от времени года и времени суток. В глубоких озерах может иметься два термоклина и более. Это существенно, поскольку многим породам промысловой рыбы нравится располагаться прямо в нем либо немного выше или ниже него. Часто мелкая рыбешка оказывается над термоклином, а более крупная промысловая рыба покоится в нем или чуть ниже. К счастью, на экране эхолота эта разница в температурах отражена. Чем значительнее разность температур, тем четче на экране виден термоклин.
Дугообразные сигналы рыб
Один из вопросов, которые нам задают наиболее часто, звучит так: «Как сделать так, чтобы на экране отображались дуги рыб?» Добиться этого совсем не сложно, требуется лишь некоторое внимание к нюансам, причем не только при настройке эхолота, но и при его монтаже.
Разрешение экрана
Количество вертикальных пикселей, на которые выводится изображение, называется разрешением экрана. Чем больше вертикальных пикселей на экране эхолота, тем четче он будет отображать дугообразные сигналы рыб. В приведенной ниже таблице для двух экранов указаны размеры пикселей и отображаемые ими участки в диапазоне дальности от 0 до 50 футов.
Как видите, при работе эхолота в диапазоне дальности от 0 до 100 футов на одном пикселе экрана представлен больший объем воды, чем при работе в эхолота в диапазоне 0-10 футов. Скажем, если у экрана эхолота 100 вертикальных пикселей, а эхолот работает в режиме 0-100 футов, каждому пикселю соответствует глубина 12 дюймов (ок. 30 см). Рыба должна быть по-настоящему крупной, чтобы при таком диапазоне быть обозначенной на экране в виде дуги! Однако, если сделать изображение мельче, с помощью функции масштабирования расширив диапазон на 30 футов (к примеру, с 80 до 110 футов), каждому пикселю будет соответствовать 3,6 дюйма (ок. 9 см). Теперь, благодаря масштабированию, та же самая рыба обозначается на экране в виде дуги. Размер дуги зависит от размеров рыбы: мелкая будет обозначена маленькой дугой, более крупная – более внушительной дугой и т.д.
При пользовании эхолотом с экраном с небольшим количеством вертикальных пикселей на мелководье, рыба, плывущая у самого дна, обозначается отдельной прямой линией. Это связано со слишком маленьким для такой глубины количеством точек. На глубокой воде (где сигнал от рыбы до лодки проходит большой путь), при отображении на экране участка дна в радиусе 20-30 футов, рыбы изображаются в виде дуг, располагающихся возле дна или какого-нибудь объекта. Это связано с уменьшением размера пикселей в большем конусе.
Скорость обновления экрана
Скорость прокрутки или обновления экрана также влияет на то, как отображаются дуги рыб на экране. Чем выше скорость обновления, тем больше пикселей активируется по мере прохождения рыбы в конусе и тем выше качество изображения дуги. (Однако не устанавливайте слишком высокую скорость обновления экрана, так как дуги рыб получатся растянутыми; поэкспериментируйте, пока не выберете скорость, наиболее вам подходящую.)
Монтаж преобразователя
Причиной недостаточно хорошего отображения дуг рыб на экране может быть неправильно выполненный монтаж преобразователя. Если он установлен на транце, его лицевая часть должна находиться в воде и быть направлена перпендикулярно вниз. Если преобразователь окажется не под прямым углом к воде, качественного отображения дугообразных сигналов рыб на экране вы не получите. Если дуга на экране загнута кверху, а не книзу, значит, передняя часть преобразователя слишком приподнята, и ее нужно опустить. Если на экране отображается лишь задняя половина дуги, значит, передняя часть преобразователя слишком опущена, и ее нужно приподнять.
И еще о дугах рыб
Самая мелкая рыбешка вообще может не отображаться в виде дуг. Из-за различных факторов состояния воды, таких, как сильные помехи от ее поверхности, термоклины и т.д., бывает, что и максимальной чувствительности эхолота недостаточно, чтобы на экране показались дуги рыб. Старайтесь установить максимальную чувствительность, но при этом следите, чтобы на экране не появлялось слишком много «мусора». Этот способ подходит для средних и больших глубин.
Стая рыб появляется на экране в виде множества различных образований и форм, в зависимости от того, какая часть стаи попала в зону излучения преобразователя. В условиях мелководья несколько плывущих рядом рыб отображаются в виде брусков, сложенных как попало. Там, где поглубже, каждая из рыб отображается на экране в соразмерно своим габаритам.
Почему именно дуги?
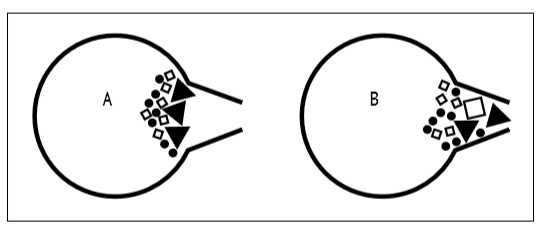
Рыбы обозначаются на экране дугами из-за соотношения между рыбой и углом излучения (конусом) преобразователя при прохождении судна над рыбой. Как только рыба пересекает линию конуса, на экране активируется пиксель. При прохождении судна над рыбой расстояние до нее сокращается, при этом глубина нахождения рыбы (расстояние по вертикали между судном и рыбой), отображаемая на экране, становится меньше (дуга идет вверх). Когда центр конуса оказывается непосредственно над рыбой, заканчивается формирование первой половины дуги. В этот момент рыба находится к судну ближе всего, сигнал усиливается, и дуга становится толще. По мере увеличения расстояния между судном и рыбой дуга на экране идет вниз и обрывается после того, как рыба выплывает из конуса (т.е. зоны излучения) эхолота.
Если рыба не проходит по прямо по центру конуса, дуга получается менее отчетливой. Поскольку рыба попадает в конус лишь на короткое время, эхосигналов меньше, а те, что все таки есть, слабее. Эта одна из причин, по которой в условиях мелководья эхолоту сложнее отображать на экране дуги рыб. Угол излучения оказывается слишком узок для того, чтобы сигнал успел приобрести форму дуги.
Помните, что для образования дуг судно и рыба должны двигаться относительно друг друга. На практике это, как правило, означает, что судно идет на тихом ходу. Если судно стоит на якоре или просто не двигается, дуги образовываться не будут, и рыбы, вплывающие в конус и выплывающие из конуса излучения эхолота отображаются на экране в виде простых горизонтальных линий.
Удачной рыбалки!
Ваш «Сусанин»
2 октября 2007 г.
ivan-susanin.ru
Эхолот для измерения уровня жидкости в скважине
Изобретение относится к устройствам для измерения уровня жидкости в скважине. Задачей изобретения является измерение с использованием газовой среды измеряемых объектов без внешнего выброса газа в атмосферу. Эхолот содержит корпус (К), к которому присоединена переходная муфта для подсоединения к устьевому ниппелю обсадной трубы, устройство приема акустических сигналов (УПАС) и генератор акустических сигналов. УПАС содержит микрофон, датчик давления, датчик температуры и блок управления. Генератор акустических сигналов включает в себя ресивер, электромагнитный клапан, присоединенный к К, и систему создания избыточного давления. Один конец ресивера соединен, а другой заглушен микрофоном. Система создания избыточного давления выполнена в виде мини-компрессора (МКП), электрически выполненного по соленоидному типу. МКП установлен на К плоскости, перпендикулярной продольной оси ресивера, с возможностью использования затрубного газа без внешнего выброса его в атмосферу. Основание УПАС смонтировано на К в плоскости, перпендикулярной продольной оси МКП. Датчик давления установлен в К с возможностью измерения статических и динамических давлений в зоне сообщения затрубья и ресивера. Датчик температуры смонтирован в теле К с возможностью участия в процессе подогрева эхолота. Подогрев эхолота осуществляется поочередным включением катушек электромагнитного клапана и МКП. 2 ил., 1 табл.
Изобретение относится к области контроля уровня жидкости в скважине акустическим методом и может быть использовано для автоматизации процесса добычи нефти.
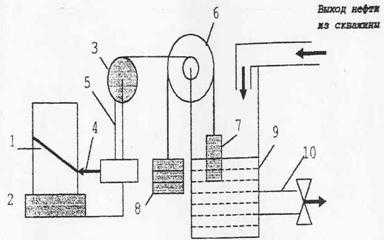
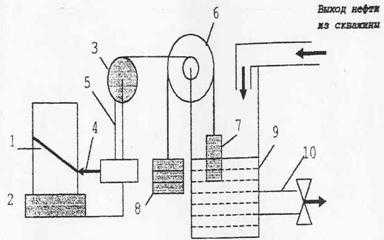
В процессе эксплуатации нефтяной скважины необходимо измерение уровня жидкости в скважине. От своевременного измерения уровня жидкости зависит срок вывода скважины на режим эксплуатации и безотказность работы насосного оборудования. Известно устройство для измерения уровня жидкости в скважине, содержащее трубку, термофон, диффузор и клапан, компенсатор с предохранительным клапаном, вакуумный поршневой насос с полым штоком, с установленной внутри штока штангой, соединенной с золотником. При этом компенсатор с предохранительным клапаном в устройстве установлен на трубке выше диффузора, а вакуумный насос - ниже диффузора (см. описание изобретения к а.с. СССР N 827768 М. кл3 E 21 В 47/04). Недостатками известного устройства являются выброс газа из затрубного пространства в атмосферу при формировании акустического сигнала, что недопустимо по технике безопасности и экологически вредно, и нарушение режима работы установок, обусловленное изменением уровня жидкости в скважине при стравливании газа в атмосферу. Указанные недостатки ограничивают область применения устройства. Наиболее близким аналогом к заявляемому техническому решению по технической сущности и достигаемому результату является эхолот для измерения уровня жидкости в скважине (см. патент США US N4934186 А, кл. E 21 В 47/00, опубл. 19.06.1990, с. 9). Эхолот содержит последовательно соединенные акустический преобразователь, усилитель, фильтр, самописец. Кроме того, эхолот содержит конструктивно связанные с акустическим преобразователем генератор акустических сигналов, стрелочный манометр и датчик давления. В качестве акустического преобразователя использован микрофон, а в качестве генератора акустических сигналов - газовый пистолет, состоящий из ресивера с выпускным клапаном. Выпускной клапан быстро открывается, когда курок спущен. Это создает импульс давления. Импульс давления подается от устьевого устройства, которое подсоединено к арматуре затрубья на поверхности, и устремляется по газу затрубья вниз. Микрофон преобразует импульс давления в электрический сигнал, который усиливается, фильтруется и выдается на печать для дальнейшей обработки данных измерения. К недостаткам такого прибора следует отнести использование в качестве генератора акустических сигналов ресивера с выпускным клапаном, что обуславливает необходимость порционного впрыска в затрубное пространство скважины сжатого инертного газа, баллоны с которым необходимо постоянно заряжать из-за ограниченного объема. Кроме того, управление, съем и обработка информации производятся при непосредственном участии оператора. Указанные недостатки ограничивают область применения прибора. Задачей изобретения является использование газовой среды исследуемых объемов без внешнего выброса газа в атмосферу, независимо от величины затрубного давления и проведение процесса измерения уровня жидкости в скважине в автономно-автоматическом режиме. Поставленная задача решается за счет того, что в эхолоте для измерения уровня жидкости в скважине, содержащем корпус, к которому присоединена переходная муфта, подсоединяемая к устьевому ниппелю обсадной трубы, генератор акустических сигналов, включающий в себя ресивер, одним концом соединенный с корпусом, электромагнитный клапан, присоединенный к корпусу, и систему создания избыточного давления, микрофон и датчик давления устройства приема акустических сигналов, согласно изобретению устройство приема акустических сигналов также снабжено датчиком температуры и блоком управления, а система создания избыточного давления выполнена в виде мини-компрессора, использующего затрубный газ без внешнего выброса его в атмосферу и установленного на корпусе в плоскости, перпендикулярной продольной оси ресивера, другой конец которого заглушен микрофоном, при этом датчик давления, измеряющий статическое и динамическое давления в зоне затрубья и ресивера, установлен в корпусе, а датчик температуры, участвующий в процессе подогрева эхолота посредством катушек указанных электромагнитного клапана и мини-компрессора поочередным включением последних, смонтирован в теле корпуса, причем основание устройства приема акустических сигналов смонтировано на корпусе в плоскости, перпендикулярной продольной оси мини-компрессора. Новизна заявляемого технического решения по сравнению с известными устройствами состоит в том, что устройство приема акустических сигналов эхолота, включающее микрофон и датчик давления, снабжено также датчиком температуры и блоком управления. Новым в заявляемом техническом решении является также то, что система создания избыточного давления, которая входит в состав генератора акустических сигналов, выполнена в виде мини-компрессора, установленного на корпусе в плоскости, перпендикулярной продольной оси ресивера, другой конец которого заглушен микрофоном. Сопоставительный анализ показал, что в ближайшем аналоге также установлен датчик давления, измеряющий статическое давление. Датчик давления в заявляемом техническом решении отслеживает величины статического и динамического давлений в зоне сообщения затрубья и ресивера, отличается от известного по выполняемым функциям и поэтому его функциональное назначение отнесено к отличительному признаку. Использование в эхолоте устройства приема акустических сигналов позволяет включить блок управления эхолотом, обеспечить нормальную температуру деталей и модулей, составляющих эхолот, при помощи датчика температуры, участвующего в отслеживании процесса подогрева посредством катушек электромагнитного клапана и мини-компрессор поочередным включением последних. Использование мини-компрессора позволяет для создания упругой акустической волны использовать газовую среду исследуемого объема без внешнего выброса газа в атмосферу независимо от величины затрубного давления. При исследовании заявляемого объекта изобретения в технической, патентной и научно-технической литературе не обнаружена указанная совокупность признаков. Это позволяет сделать вывод о том, что эта совокупность признаков не очевидна для специалистов в данной области техники. Использование признаков заявляемой совокупности дает возможность получить новый технический эффект, следовательно, заявляемое техническое решение имеет изобретательский уровень по сравнению с существующим уровнем техники. Заявляемое техническое решение промышленно применимо, так как может быть изготовлено промышленным способом, работоспособно, осуществимо и воспроизводимо, следовательно, соответствует условию патентоспособности "промышленная применимость". Изобретение иллюстрируется следующими чертежами: на фиг. 1 изображен общий вид эхолота; на фиг. 2 разрез А-А на фиг. 1. Эхолот представляет стальную сборно-модульную конструкцию, состоящую из корпуса 1, к которому присоединена переходная муфта 2, подсоединяемая к устьевому ниппелю обсадной трубы, ресивера 3, мини-компрессора 4, электромагнитного клапана 5, блока управления 6, вентиля 7. Корпус 1 является главным несущим элементом эхолота для общей сборки всех модулей на и в своем теле. Основание 8 устройства приема акустических сигналов и ресивер 3 приварены к корпусу 1 сплошным герметичным швом 9. Остальные модули крепятся резьбовыми и винтовыми соединениями с целью взаимозаменяемости однотипных модулей, упрощения обслуживания и ремонта. Ресивер 3 одним концом приварен к корпусу 1, противоположный конец заглушен микрофоном 10 и защитной крышкой 11. Мини-компрессор 4 установлен на корпусе 1 с помощью болтов 12 в плоскости, перпендикулярной продольной оси ресивера 3. Мини-компрессор 4 зажимает в теле корпуса 1 через втулку магнитопровода 13, рабочий цилиндр 14, в котором установлен поршень 15, соединенный с якорем 16, подпружиненный при помощи пружины 17 и работающий в пределах упорных буферов 18. Направляющая 19 смонтирована в верхней части мини-компрессора 4 и обеспечивает соосность перемещения якоря 16 в катушке 20 и скольжение поршня 15 в цилиндре 14. Электрически конструкция мини-компрессора 4 выполнена по соленоидному типу и работает в возвратно-поступательном режиме. Электромагнитный клапан 5 прикреплен к корпусу 1 болтами 21. Защитный колпачок 22 и седло 23 через кольцо-магнитопровод 24 прижаты электромагнитным клапаном 5, при этом седло 23 запирает клапан 25 с якорем 26 усилием пружины 27. В катушке клапана 28 вплотную к защитному колпачку 22 установлен сердечник 29. Электрически конструкция электромагнитного клапана 5 выполнена по соленоидному типу и работает на втягивание якоря 26, прикрепленного к клапану 25. В составе устройства приема акустических сигналов использованы пьезоэлектрический микрофон 10, датчик давления 30, датчик температуры 31, блок управления 6. Для принудительного стравливания газа и конденсата из ресивера 3 в моменты демонтажа устройства со скважины в нижней части корпуса 1 установлен игольчатый вентиль 7. Переходная муфта 2 изготавливается с заданным резьбовым или фланцевым типом исполнения в зависимости от вида патрубка на устье скважины и фиксируется на корпусе 1 с помощью планки 32 болтами 33. Для работы в условиях низких температур эхолот снабжен теплозащитным чехлом (на чертеже не показано). Эхолот работает следующим образом. После установки и подключения автоматического эхолота на устьевом оборудовании скважины он готов к работе. Для запуска в режим эхометрирования необходимо открыть устьевую задвижку, связывающую внутренний объем устройства с затрубным пространством скважины, и включить блок управления 6. Газ заполнит весь внутренний объем эхолота. Исходное состояние электромагнитного клапана 5 "закрыт". Датчик температуры 31 производит обмер температуры тела устройства, и, если температура ниже 0 градусов, то поочередным включением катушек 20, 28 происходит подогрев эхолота до этой величины. При положительных температурах функция подогрева не отрабатывается. После фиксации начальной величины давления датчиком 30 включается в работу мини-компрессор 4. Возвратно-поступательным втягиванием якоря 16 в катушку 20 поршень 15 проталкивает через цилиндр 14 порции газа в резервуар ресивера 3. Создается перепад давлений в ресивере от затрубного. При достижении заданной величины перепада в 1.5 - 2.0 кгс/см2, зафиксированной датчиком давления 30, работа мини-компрессора прекращается. Далее включается катушка электромагнитного клапана 28 и сердечник 26, втягиваясь в нее, открывает клапан 25. Избыток давления в ресивере 3, выбрасываясь в затрубное пространство, создает зондирующую акустическую волну в газовой среде, начало которой и отклик от раздела сред газ-жидкость фиксирует пьезоэлектрический микрофон 10. По времени прохождения акустической волны в газовой среде определяется расстояние от устья скважины до границы раздела сред газ-жидкость с учетом давления газовой среды, определяющей скорость распространения звуковой волны. Полученное расстояние определяется как произведение 1/2 времени прохождения звукового сигнала до раздела фаз газ-жидкость и обратно на скорость прохождения звукового сигнала, взятую из таблицы зависимости скорости звука от затрубного давления и состава газа (см. таблицу по Татарстану). S=t/2V, где S- глубина, t - время прохождения сигнала от устья и обратно, V - скорость, взятая из таблицы. Зависимость скорости звука от затрубного давления и состава газа определена для каждого нефтяного региона России и стран СНГ и приведена в соответствующих таблицах, которыми располагают территориальные НГДУ (нефтегазодобывающие управления). Использование заявляемого эхолота позволит, учитывая результаты измерения, автономно управлять процессом работы насосного оборудования, а также для телеметрии в глобальных системах управления и сбора информации.Формула изобретения
Эхолот для измерения уровня жидкости в скважине, содержащий корпус, к которому присоединена переходная муфта, подсоединяемая к устьевому ниппелю обсадной трубы, генератор акустических сигналов, включающий в себя ресивер, одним концом соединенный с корпусом, электромагнитный клапан, присоединенный к корпусу, и систему создания избыточного давления, устройство приема акустических сигналов, содержащее микрофон, датчик давления, датчик температуры и блок управления, отличающийся тем, что система создания избыточного давления выполнена в виде мини-компрессора, электрически выполненного по соленоидному типу и установленного на корпусе в плоскости, перпендикулярной продольной оси ресивера, с возможностью использования затрубного газа без внешнего выброса его в атмосферу, другой конец ресивера заглушен микрофоном, основание устройства приема акустических сигналов смонтировано на корпусе в плоскости, перпендикулярной продольной оси мини-компрессора, датчик давления установлен в корпусе с возможностью измерения статических и динамических давлений в зоне сообщения затрубья и ресивера, датчик температуры смонтирован в теле корпуса с возможностью участия в процессе подогрева эхолота, осуществляющегося поочередным включением катушек указанных электромагнитного клапана и мини-компрессора.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3findpatent.ru
Эхолокация — Википедия
Материал из Википедии — свободной энциклопедии
Эхолокация (эхо и лат. locatio — «положение») — способ, при помощи которого положение объекта определяется по времени задержки возвращений отражённой волны. Если волны являются звуковыми, то это звуколокация, если радио — радиолокация.
Открытие эхолокации связано с именем итальянского естествоиспытателя Ладзаро Спалланцани. Он обратил внимание на то, что летучие мыши свободно летают в абсолютно тёмной комнате (где оказываются беспомощными даже совы), не задевая предметов. В своём опыте он ослепил несколько животных, однако и после этого они летали наравне со зрячими[1]. Коллега Спалланцани Ж. Жюрин провёл другой опыт, в котором залепил воском уши летучих мышей, — и зверьки натыкались на все предметы. Отсюда учёные сделали вывод, что летучие мыши ориентируются по слуху[2]. Однако эта идея была высмеяна современниками, поскольку ничего большего сказать было нельзя — короткие ультразвуковые сигналы в то время ещё было невозможно зафиксировать[3].
Впервые идея об активной звуковой локации у летучих мышей была высказана в 1912 году Х. Максимом. Он предполагал, что летучие мыши создают низкочастотные эхолокационные сигналы взмахами крыльев с частотой 15 Гц[3].
Об ультразвуке догадался в 1920 году англичанин Х. Хартридж, воспроизводивший опыты Спалланцани. Подтверждение этому нашлось в 1938 году благодаря биоакустику Д. Гриффину и физику Г. Пирсу. Гриффин предложил название эхолокация (по аналогии с радиолокацией) для именования способа ориентации летучих мышей при помощи ультразвука[3].
Животные используют эхолокацию для ориентации в пространстве и для определения местоположения объектов вокруг, в основном при помощи высокочастотных звуковых сигналов. Наиболее развита у летучих мышей и дельфинов, также её используют землеройки, ряд видов ластоногих (тюлени), птиц (гуахаро, саланганы и др.).
Происхождение эхолокации у животных остаётся неясным; вероятно, она возникла как замена зрению у тех, кто обитает в темноте пещер или глубин океана. Вместо световой волны для локации стала использоваться звуковая[3].
Данный способ ориентации в пространстве позволяет животным обнаруживать объекты, распознавать их и даже охотиться в условиях полного отсутствия света, в пещерах и на значительной глубине.
Среди членистоногих эхолокация обнаружена только у ночных бабочек совок.[4]
Человек в некотором роде тоже использует эхолокацию: услышав звук в помещении, человек может определить приблизительный объём помещения, мягкость стен и т. п.
 Средства звукового наблюдения времён Первой мировой войны
Средства звукового наблюдения времён Первой мировой войны Эхолокация может быть основана на отражении сигналов различной частоты — радиоволн, ультразвука и звука. Первые эхолокационные системы направляли сигнал в определённую точку пространства и по задержке ответа определяли её удалённость при известной скорости перемещения данного сигнала в данной среде и способности препятствия, до которого измеряется расстояние, отражать данный вид сигнала. Обследование участка дна таким образом при помощи звука занимало значительное время.
Сейчас используются различные технические решения с одновременным использованием сигналов различной частоты, которые позволяют существенно ускорить процесс эхолокации.
ru.wikipedia.org
Определение давления в скважине по результатам эхолотирования — КиберПедия
Исследование скважин, оборудованных ШСНУ, осложняется тем, что спуск глубинных приборов в насосные трубы исключен, т. к. этому мешает колонна штанг и глубинный насос. Поэтому для определения давления на забое скважины используют косвенный метод – по формуле гидростатического давления.
Рисунок 5.3 –Положение уровня в простаивающей (а) и работающей (б) скважине
Пластовое давление в длительно простаивающей скважине определяют по формуле:
, (5.2)
где Hст – статический уровень, м; rж – плотность жидкости в скважине, кг/м3. Плотность жидкости обычно принимают равной плотности дегазированной нефти с учетом обводненности; g – ускорение свободного падения (g=9,81 м/с2).
В работающей скважине забойное давление будет
, (5.3)
где Hдин – динамический уровень, м.
Зная глубину скважины L и расстояние до уровня жидкости Hур, определенное по результатам эхолотирования можно определить:
и (5.4)
Порядок выполнения лабораторной работы
1) Ознакомиться с устройством и принципом работы эхолота ЭП-1.
2) Определить расстояние до уровня жидкости, используя данные, полученные при расшифровке эхограммы.
3) Рассчитать пластовое и забойное давление в скважине.
4) Результаты расчетов занести в таблицу 5.1.
6. Контрольные вопросы
1. Назначение эхолота.
2. Назовите основные узлы эхолота
3. Назначение отдельных частей эхолота.
4. Назовите основные предельные параметры применения прибора.
5. Как определяется глубина уровня жидкости в скважине?
Задание к лабораторной работе
ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ ДО УРОВНЯ ЖИДКОСТИ В СКВАЖИНЕ ЭХОЛОТОМ ЭП-1
| № | Глубина скважи ны, L, м | Глубин установки репера Нр, м | Плот ность жидкости Рж, кг/м3 | Lp, мм | Lур, мм | |
| Простаи вающая сква жина | Работающая скважина | |||||
ЛАБОТАТОРНАЯ РАБОТА №6
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ПОДАЧИ ШТАНГОВОЙ СКВАЖИННОЙ НАСОСНОЙ УСТАНОВКИ
1. Цель работы:
· Изучение принципа работы штанговой насосной установки;
· Снятие кривой действительной подачи насосной установки;
· Определение коэффициента подачи установки штангового насоса;
Теоретические основы
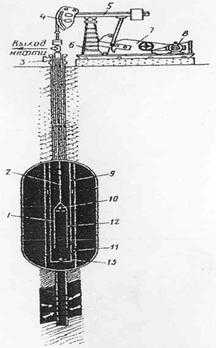
Рисунок 1– Принципиальная схема штанговой скважинной установки
Штанговая скважинная насосная установка (ШСНУ) состоит из насоса 1, находящегося в скважине, и станка-качалки 6, установленного на поверхности у устья. Цилиндр 11 насоса укреплен на конце спущенных в скважину насосно-компрессорных (подъемных) труб 9, а плунжер 12 подвешен на колонне штанг 2. Верхняя штанга (полированный шток) соединена с головкой балансира 5 станка-качалки с помощью канатной подвески.
В верхней части цилиндра установлен нагнетательный клапан 10, а в нижней – всасывающий клапан 13. Колонна насосно-компрессорных труб, по которой жидкость от насоса поднимается на поверхность, заканчивается на устье тройником 3.
Сальниковое устройство в верхней части тройника предназначено для предотвращения утечек жидкости вдоль движущегося сальникового (полированного) штока. По боковому отводу в средней части тройника жидкость из скважины направляется в выкидную линию.
Возвратно-поступательное движение колонне насосных штанг передается от электродвигателя 8 через редуктор 7 и кривошипно-шатунный механизм станка-качалки.
Принцип действия насоса. При движении плунжера вверх всасывающий клапан 13 под давлением жидкости открывается, в результате чего жидкость поступает в цилиндр насоса. Нагнетательный клапан 10 в это время закрыт, так как на него действует давление столба жидкости, заполнившей насосные трубы. При движении плунжера 12 вниз всасывающий клапан 13 под давлением жидкости, находящейся под плунжером, закрывается, а нагнетательный клапан открывается и жидкость из цилиндра переходит в пространство над плунжером.
Коэффициентом подачи установки штангового насоса называется отношение действительной производительности штангового насоса Qд к условной теоретической его производительности Qут
(6.1)
Условная теоретическая производительность Qут определяется по формуле
(6.2)
где Fпл – площадь сечения плунжера насоса, м;
S – длина хода полированного штока, м;
N – число качаний балансира в секунду.
Коэффициент подачи учитывает:
· Степень наполнения цилиндра насоса;
· Возможные утечки жидкости из труб и насоса обратно в скважину;
· Возможное несоответствие истинного хода плунжера и хода полированного штока вследствие упругих деформаций штанг и труб;
· Возможное уменьшение объема нефти, замеренного в мернике по сравнению с объемом нефти, прошедшей через насос, вследствие ее разгазирования (усадка нефти).
По данным замеров дебита и вычисленным коэффициентам подачи штангового насоса можно судить о правильности установленного для скважины технологического режима или о неполадках в работе насоса.
Лабораторная установка
Действительная подача штангового насоса Q замеряется на поверхности в мернике. Для этой цели служит специальный прибор – дебитомер, записывающий кривую наполнения мерника. (Рисунок 1.2)
1 – барабан, 2 – часовой механизм, 3 – замерный шкив, 4 – перо, 5 – нить, 6 – ведущий шкив, 7 – поплавок, 8 – противовес, 9 – мерник, 10 – выкид мерника.
Рисунок 2 – Схема лабораторной установки
cyberpedia.su
Определение давления в скважине по результатам эхолотирования — Студопедия.Нет
Исследование скважин, оборудованных ШСНУ, осложняется тем, что спуск глубинных приборов в насосные трубы исключен, т. к. этому мешает колонна штанг и глубинный насос. Поэтому для определения давления на забое скважины используют косвенный метод – по формуле гидростатического давления.
Рисунок 5.3 –Положение уровня в простаивающей (а) и работающей (б) скважине
Пластовое давление в длительно простаивающей скважине определяют по формуле:
, (5.2)
где Hст – статический уровень, м; rж – плотность жидкости в скважине, кг/м3. Плотность жидкости обычно принимают равной плотности дегазированной нефти с учетом обводненности; g – ускорение свободного падения (g=9,81 м/с2).
В работающей скважине забойное давление будет
, (5.3)
где Hдин – динамический уровень, м.
Зная глубину скважины L и расстояние до уровня жидкости Hур, определенное по результатам эхолотирования можно определить:
и (5.4)
Порядок выполнения лабораторной работы
1) Ознакомиться с устройством и принципом работы эхолота ЭП-1.
2) Определить расстояние до уровня жидкости, используя данные, полученные при расшифровке эхограммы.
3) Рассчитать пластовое и забойное давление в скважине.
4) Результаты расчетов занести в таблицу 5.1.
Контрольные вопросы
1. Назначение эхолота.
2. Назовите основные узлы эхолота
3. Назначение отдельных частей эхолота.
4. Назовите основные предельные параметры применения прибора.
5. Как определяется глубина уровня жидкости в скважине?
Задание к лабораторной работе
ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ ДО УРОВНЯ ЖИДКОСТИ В СКВАЖИНЕ ЭХОЛОТОМ ЭП-1
| № | Глубина скважи ны, L, м | Глубин установки репера Нр, м | Плот ность жидкости Рж, кг/м3 | Lp, мм | Lур, мм | |
| Простаи вающая сква жина | Работающая скважина | |||||
| 1 | 1200 | 80 | 880 | 17 | 22 | 35 |
| 2 | 1100 | 90 | 900 | 20 | 31 | 40 |
| 3 | 1000 | 100 | 915 | 21 | 36 | 45 |
| 4 | 950 | 110 | 920 | 22 | 46 | 55 |
| 5 | 1100 | 115 | 925 | 24 | 40 | 48 |
| 6 | 1190 | 120 | 935 | 22 | 35 | 50 |
| 7 | 1215 | 125 | 910 | 28 | 32 | 53 |
| 8 | 1300 | 130 | 905 | 29 | 46 | 55 |
| 9 | 1350 | 125 | 890 | 25 | 40 | 58 |
| 10 | 1400 | 120 | 870 | 24 | 42 | 60 |
ЛАБОТАТОРНАЯ РАБОТА №6
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ПОДАЧИ ШТАНГОВОЙ СКВАЖИННОЙ НАСОСНОЙ УСТАНОВКИ
1. Цель работы:
· Изучение принципа работы штанговой насосной установки;
· Снятие кривой действительной подачи насосной установки;
· Определение коэффициента подачи установки штангового насоса;
Теоретические основы
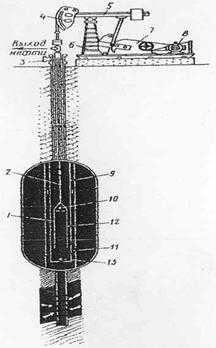
Рисунок 1– Принципиальная схема штанговой скважинной установки
Штанговая скважинная насосная установка (ШСНУ) состоит из насоса 1, находящегося в скважине, и станка-качалки 6, установленного на поверхности у устья. Цилиндр 11 насоса укреплен на конце спущенных в скважину насосно-компрессорных (подъемных) труб 9, а плунжер 12 подвешен на колонне штанг 2. Верхняя штанга (полированный шток) соединена с головкой балансира 5 станка-качалки с помощью канатной подвески.
В верхней части цилиндра установлен нагнетательный клапан 10, а в нижней – всасывающий клапан 13. Колонна насосно-компрессорных труб, по которой жидкость от насоса поднимается на поверхность, заканчивается на устье тройником 3.
Сальниковое устройство в верхней части тройника предназначено для предотвращения утечек жидкости вдоль движущегося сальникового (полированного) штока. По боковому отводу в средней части тройника жидкость из скважины направляется в выкидную линию.
Возвратно-поступательное движение колонне насосных штанг передается от электродвигателя 8 через редуктор 7 и кривошипно-шатунный механизм станка-качалки.
Принцип действия насоса. При движении плунжера вверх всасывающий клапан 13 под давлением жидкости открывается, в результате чего жидкость поступает в цилиндр насоса. Нагнетательный клапан 10 в это время закрыт, так как на него действует давление столба жидкости, заполнившей насосные трубы. При движении плунжера 12 вниз всасывающий клапан 13 под давлением жидкости, находящейся под плунжером, закрывается, а нагнетательный клапан открывается и жидкость из цилиндра переходит в пространство над плунжером.
Коэффициентом подачи установки штангового насоса называется отношение действительной производительности штангового насоса Qд к условной теоретической его производительности Qут
(6.1)
Условная теоретическая производительность Qут определяется по формуле
(6.2)
где Fпл – площадь сечения плунжера насоса, м;
S – длина хода полированного штока, м;
N – число качаний балансира в секунду.
Коэффициент подачи учитывает:
· Степень наполнения цилиндра насоса;
· Возможные утечки жидкости из труб и насоса обратно в скважину;
· Возможное несоответствие истинного хода плунжера и хода полированного штока вследствие упругих деформаций штанг и труб;
· Возможное уменьшение объема нефти, замеренного в мернике по сравнению с объемом нефти, прошедшей через насос, вследствие ее разгазирования (усадка нефти).
По данным замеров дебита и вычисленным коэффициентам подачи штангового насоса можно судить о правильности установленного для скважины технологического режима или о неполадках в работе насоса.
Лабораторная установка
Действительная подача штангового насоса Q замеряется на поверхности в мернике. Для этой цели служит специальный прибор – дебитомер, записывающий кривую наполнения мерника. (Рисунок 1.2)
1 – барабан, 2 – часовой механизм, 3 – замерный шкив, 4 – перо, 5 – нить, 6 – ведущий шкив, 7 – поплавок, 8 – противовес, 9 – мерник, 10 – выкид мерника.
Рисунок 2 – Схема лабораторной установки
studopedia.net
Эхолокация - это... Что такое Эхолокация?
Эхолокация (эхо и лат. locatio — «положение») — способ, при помощи которого положение объекта определяется по времени задержки возвращений отражённой волны. Если волны являются звуковыми, то это звуколокация, если радио — радиолокация.
История
Открытие эхолокации связано с именем итальянского естествоиспытателя Ладзаро Спалланцани. Он обратил внимание на то, что летучие мыши свободно летают в абсолютно тёмной комнате (где оказываются беспомощными даже совы), не задевая предметов. В своём опыте он ослепил несколько животных, однако и после этого они летали наравне со зрячими. Коллега Спалланцани Ж. Жюрин провёл другой опыт, в котором залепил воском уши летучих мышей, — и зверьки натыкались на все предметы. Отсюда учёные сделали вывод, что летучие мыши ориентируются по слуху. Однако эта идея была высмеяна современниками, поскольку ничего большего сказать было нельзя — короткие ультразвуковые сигналы в то время ещё было невозможно зафиксировать[1].
Впервые идея об активной звуковой локации у летучих мышей была высказана в 1912 году Х. Максимом. Он предполагал, что летучие мыши создают низкочастотные эхолокационные сигналы взмахами крыльев с частотой 15 Гц[1].
Об ультразвуке догадался в 1920 году англичанин Х. Хартридж, воспроизводивший опыты Спалланцани. Подтверждение этому нашлось в 1938 году благодаря биоакустику Д. Гриффину и физику Г. Пирсу. Гриффин предложил название эхолокация (по аналогии с радиолокацией) для именования способа ориентации летучих мышей при помощи ультразвука[1].
Эхолокация у животных
Животные используют эхолокацию для ориентации в пространстве и для определения местоположения объектов вокруг, в основном при помощи высокочастотных звуковых сигналов. Наиболее развита у летучих мышей и дельфинов, также её используют землеройки, ряд видов ластоногих (тюлени), птиц (гуахаро, саланганы и др.).
Происхождение эхолокации у животных остаётся неясным; вероятно, она возникла как замена зрению у тех, кто обитает в темноте пещер или глубин океана. Вместо световой волны для локации стала использоваться звуковая[1].
Данный способ ориентации в пространстве позволяет животным обнаруживать объекты, распознавать их и даже охотиться в условиях полного отсутствия света, в пещерах и на значительной глубине.
Среди членистоногих эхолокация обнаружена только у ночных бабочек совок.[2]
Техническое обеспечение эхолокации
 средства звукового наблюдения времен Первой мировой войны
средства звукового наблюдения времен Первой мировой войны Эхолокация может быть основана на отражении сигналов различной частоты — радиоволн, ультразвука и звука. Первые эхолокационные системы направляли сигнал в определённую точку пространства и по задержке ответа определяли её удалённость при известной скорости перемещения данного сигнала в данной среде и способности препятствия, до которого измеряется расстояние, отражать данный вид сигнала. Обследование участка дна таким образом при помощи звука занимало значительное время.
Сейчас используются различные технические решения с одновременным использованием сигналов различной частоты, которые позволяют существенно ускорить процесс эхолокации.
Примечания
См. также
Библиография
dic.academic.ru
ЭХОЛОТИРОВАНИЕ - это... Что такое ЭХОЛОТИРОВАНИЕ?
- ЭХОЛОТИРОВАНИЕ
- — определение глубины моря с помощью эхолота. При помощи его можно также получить отражения от геол. границ, залегаюших на небольшой глубине под дном водоема. Для геол. картирования морского дна применяют эхолоты повышенной мощн. или сходную с ними аппаратуру, обладающую достаточной мощн. и регистрирующую звуковые и ультразвуковые частоты. Регистрация ведется непрерывно в движении, получаемая запись имеет вид геол. профиля. Глубина исследования — 25—30 м ниже морского дна. Применение более мощных излучателей позволяет исследовать глубины до нескольких сот м ниже морского дна. Большое практическое значение имеет Э. для исследования геол. строения неглубоких горизонтов под морским дном в мелководных участках моря, где проектируются сооружения оснований для нефтяных вышек, фундаментов для мостов и эстакад, молов и др. морских сооружений. Значительная детальность и высокая разрешающая способность Э. позволяют получить достаточно точный разрез донных отл. Син. метод акустический.
Геологический словарь: в 2-х томах. — М.: Недра. Под редакцией К. Н. Паффенгольца и др.. 1978.
- ЭХИНОЛИТЫ
- ЭШВЕГЕИТ
Смотреть что такое "ЭХОЛОТИРОВАНИЕ" в других словарях:
эхолотирование — эхолотирование … Орфографический словарь-справочник
эхолотирование — сущ., кол во синонимов: 1 • эхолокация (2) Словарь синонимов ASIS. В.Н. Тришин. 2013 … Словарь синонимов
эхолотирование — echolokacija statusas T sritis ekologija ir aplinkotyra apibrėžtis Daiktų (objektų) buvimo vietos vandenyje ar kitoje terpėje nustatymas ultragarsu. atitikmenys: angl. echo sounding vok. Echolotung, f rus. эхолотирование, n … Ekologijos terminų aiškinamasis žodynas
эхолокация — эхолотирование, локация Словарь русских синонимов. эхолокация сущ., кол во синонимов: 2 • локация (3) • … Словарь синонимов
Геоморфология — (от Гео…, греч. morphé форма и …логия (См. ...Логия)) наука о рельефе земной поверхности. Предмет и метод геоморфологии. Г. изучает рельеф суши, дна океанов и морей со стороны его внешнего (физиономического) облика, происхождения … Большая советская энциклопедия
МЕТОД АКУСТИЧЕСКИЙ — син. термина эхолотирование. Геологический словарь: в 2 х томах. М.: Недра. Под редакцией К. Н. Паффенгольца и др.. 1978 … Геологическая энциклопедия
Echolotung — echolokacija statusas T sritis ekologija ir aplinkotyra apibrėžtis Daiktų (objektų) buvimo vietos vandenyje ar kitoje terpėje nustatymas ultragarsu. atitikmenys: angl. echo sounding vok. Echolotung, f rus. эхолотирование, n … Ekologijos terminų aiškinamasis žodynas
echo-sounding — echolokacija statusas T sritis ekologija ir aplinkotyra apibrėžtis Daiktų (objektų) buvimo vietos vandenyje ar kitoje terpėje nustatymas ultragarsu. atitikmenys: angl. echo sounding vok. Echolotung, f rus. эхолотирование, n … Ekologijos terminų aiškinamasis žodynas
echolokacija — statusas T sritis ekologija ir aplinkotyra apibrėžtis Daiktų (objektų) buvimo vietos vandenyje ar kitoje terpėje nustatymas ultragarsu. atitikmenys: angl. echo sounding vok. Echolotung, f rus. эхолотирование, n … Ekologijos terminų aiškinamasis žodynas
dic.academic.ru
Гидролокатор — Википедия
Материал из Википедии — свободной энциклопедии
Гидролока́тор — средство звукового обнаружения подводных объектов с помощью акустического излучения.
По принципу действия гидролокаторы бывают:
- Пассивные — позволяющие определять место положения подводного объекта по звуковым сигналам, излучаемым самим объектом (шумопеленгование).
- Активные — использующие отражённый или рассеянный подводным объектом сигнал, излучённый в его сторону гидролокатором.
Активный гидролокатор «Асдик» в его первоначальной примитивной форме был изобретён в конце первой мировой войны во Франции Константином Шиловским и Полем Ланжевеном. Основной принцип его действия остался неизменным до настоящего времени. Однако за прошедшие годы эффективность гидролокатора значительно возросла, расширились масштабы его использования, а также увеличилось число классов кораблей, с которых он мог применяться для проведения поиска и атак подводных лодок противника.
Основу составляет приёмопередатчик, который посылает звуковые импульсы в требуемом направлении, а также принимает отражённые импульсы, если посылка, встретив на своём пути какой-либо объект, отразится от него. Эти посылки и отражённые сигналы после преобразования звучат очень похоже на то, как произносится слово «пинг». Поэтому его стали[кто?] называть «пингсетом» (англ. ping set), работу на нём назвали «пингинг» (англ. pinging), а офицера-специалиста по противолодочной борьбе — «пингер» (англ. pinger).
Вращая приёмопередатчик подобно прожектору, можно определить по компасу направление, в котором послан «пинг», а следовательно, и направление объекта, от которого «пинг» отражён. Замерив промежуток времени между посылкой импульса и приёмом отражённого сигнала, можно определить расстояние до обнаруженного объекта.
- Эхолот — узкоспециализированный гидролокатор, устройство для исследования рельефа дна водного бассейна. Обычно использует ультразвуковой передатчик и приёмник, а также ЭВМ для обработки полученных данных и отрисовки топографической карты дна.
В 2018 году группа исследователей из Пенсильванского университета разработала устройство сокрытия, эффективно работающее под водой. Этот новый "метаматериальный плащ-невидимка" способен перехватить и преломить распространяющиеся под водой акустические волны, которыми прощупывают окружающее пространство гидролокаторы. При этом, все это происходит без малейшего отражения или рассеивания звуковых волн, благодаря чему сонар не сможет узнать о том, что в пределах его досягаемости находится какой-либо объект[1].
ru.wikipedia.org