Траектория ствола скважины
Управление траекторией скважины в процессе бурения — Мегаобучалка
Управление траекторией ствола скважины в процессе бурения можно подразделить на следующие темы:
- предупреждение искривления вертикального ствола скважины,
- изменение направления бурения из вертикального ствола скважины в заданном направлении,
- изменение направления ствола скважины из наклонно-направленного ствола скважины по вертикали и горизонтали,
В процессе бурения вертикального ствола скважины обычно используют жёсткие компоновки низа бурильной колонны, которые бурят прямо, вдоль своей оси, так как сами не изгибаются. Однако, на пути долот в горных породах часто встречаются небольшие образования, по твёрдости большие, чем окружающие породы. Например, булыжник кремня среди известняка. Или, встречаются породы, у которых пласты лежат не горизонтально, а под большим углом (так называемые, большие углы падения пластов). А пласты горных пород бурить легче вдоль, а не поперёк. Или, ещё бывает, что горные породы хаотично перемяты под действием тектонических процессов. В таких случаях долото устремляется по пути наименьшего сопротивления, и фактическая траектория ствола скважины бурится с отклонением от проектной. Для предупреждения этого применяют различные КНБК (Рисунок 68). Например, применят жёсткие компоновки, маятниковые, и КНБК с кривым переводником или автоматом перекоса
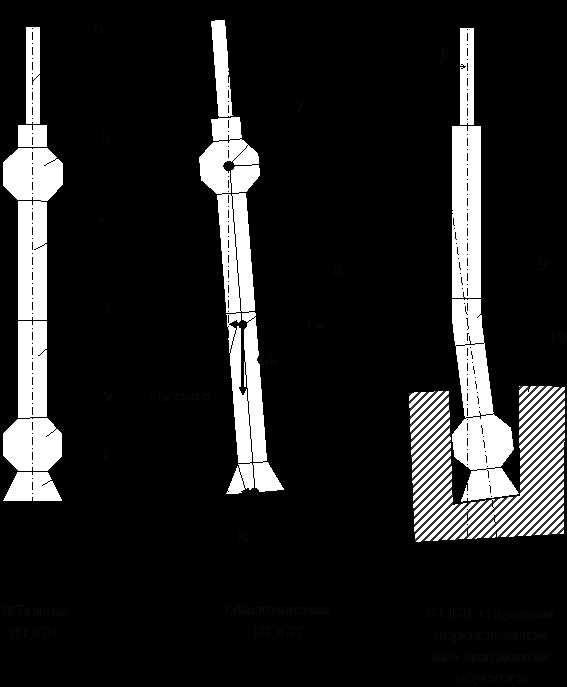
Рисунок 68. Примеры КНБК для предупреждения и компенсации искривления вертикального ствола скважины при бурении
где: 1 – долото, 2 – центратор-калибратор, 3 – забойный двигатель, 4 – утяжелённая бурильная колонна, 5 – центратор, 6 – бурильная труба, 7 – центр вращения шарнира рычага, 8 – центр тяжести рычага, 9 – кривой переводник или автомат перекоса, 10 – горная порода с большими углами падения пластов, α – угол отклонения маятниковой компоновки от вертикали, β – угол перекоса КНБК, GР – вес рычага (части КНБК ниже шарнира – ценратора).
Жёсткие компоновки в большинстве случаев обеспечивают достаточную стабильность бурения в заданном направлении бурения, особенно в породах с небольшими углами падения пластов.
Маятниковая компоновка для предупреждения искривления вертикальных скважин применяется очень редко. Разве ж только когда приходится бурить в зоне хаотической тектонической перемятости. Например, в местах столкновения геологических плит, в зонах разломов или горных обвалов.
А вот с КНБК с кривым переводником или автоматом перекоса в этом деле имеют большие перспективы, особенно в породах с большими углами пластов. В самом деле, ведь если известно, насколько и в какую сторону фактическая траектория ствола скважины отклонится, то можно применять компенсационное искривление ствола скважины, и в результате скважина не искривится, а останется вертикальной.
После того, как вертикальный участок скважины пробурен, начинается операция по бурению участка скважины с набором зенитного угла. Если бурение идёт роторным способом, то используют клин, а если есть забойный двигатель, то используют КНБК с кривым переводником или автоматом перекоса (Рисунок 69).
Клин делается из стали. Он имеет наклонный, направляющий долото жёлоб. Клин спускают на забой, ориентируют в нужном направлении и цементируют. После этого начинают бурение, и долото, скользя по жёлобу, начинает бурить наклонно-направленно.
Если производится бурение с забойным двигателем, без вращения бурильной колонны, то при наборе угла не нужно тратить времени на установку клина и ожидание затвердевания цемента. В компоновку просто включается кривой переводник, КНБК ориентируют в нужном направлении, и н бурят с набором угла в нужном направлении.
В последнее время начали появляться дорогие автоматы перекоса, которые используют в паре с дорогой телесистемой контроля бурения.
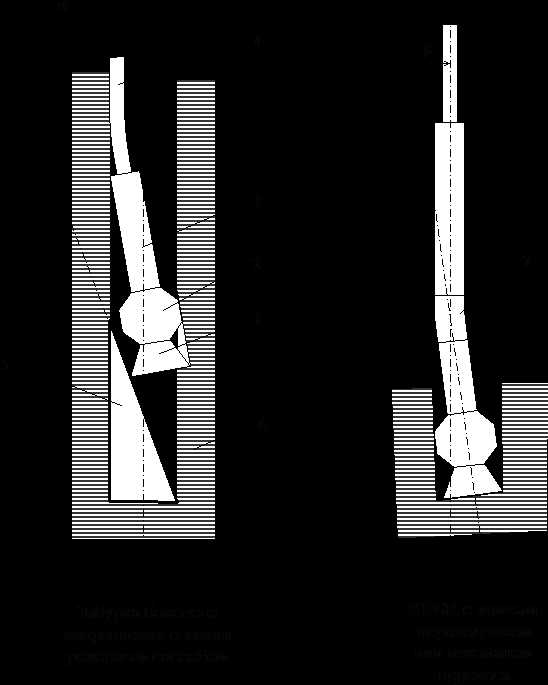
Рисунок 69. Примеры КНБК для изменения направления бурения из вертикального ствола скважины в заданном направлении
где: 1 – долото, 2 – центратор-калибратор, 3 – колонна УБТ, 4 – бурильная труба, 5 – стальной клин с направляющим долото жёлобом, 6 – горная порода с горизонтальными пластами, 7 – кривой переводник или автомат перекоса, α – угол наклона клина, β – угол перекоса.
Когда уже набран достаточно большой зенитный угол участка ствола скважины, то дальнейшее увеличение зенитного угла может производится способом, не требующим наличие кривого переводника в КНБК и телесистемы (Рисунок 70).

Рисунок 70. Пример КНБК для набора зенитного угла скважины
где: 1 – долото, 2 – переводник, 3 – центратор-калебратор, 4 – забойный двигатель, 5 – УБТ, 6 – неполноразмерный центратор, 7 – трубы бурильные толстостенные, 8 – горная порода, 9 – бурильная труба, α – угол перекоса КНБК
Если же понадобится бурить участок с падением ствола скважины, то можно использовать, например, ту же маятниковую компоновку (Рисунок 71).
Рисунок 71. Пример маятниковой компоновки для уменьшения зенитного угла скважины
где: 1 – долото, 2 – забойный двигатель, 3 – УБТ, 4 – центратор, 5 – трубы бурильные толстостенные, 6 – бурильная труба
Крепление скважин
megaobuchalka.ru
Усовершенствованное управление траекторией ствола скважины
Область техники
Настоящее изобретение относится к способу усовершенствованного управления траекториями ствола скважины с одновременным повышением скоростей проходки при турбинном бурении.
Уровень техники
Большинство нефтяных и газовых скважин, пробуренных в настоящее время, представляют собой наклонно-направленные скважины, а это значит, что их траектория и точка (точки) вскрытия продуктивного горизонта существенно отклоняется (отклоняются) от прямой вертикальной скважины. Траекторию скважины часто описывают посредством так называемой обзорной таблицы, в которой указано, как меняются угол наклона и азимутальный угол в зависимости от измеренной глубины. Наклон представляет собой угловое отклонение от вертикали, а азимут относится к географическому направлению, при этом измеренная глубина относится к длине дуги по стволу скважины от выбранной координаты исходного положения на поверхности. Точки вскрытия продуктивного горизонта и траектории ствола скважины также могут быть описаны в прямоугольной системе координат, известных как направление к северу, направление к востоку и глубина по вертикали.
Наклонно-направленное бурение представляет собой способ бурения скважины, при котором ее профиль точно следует запланированной траектории ствола скважины. Неудовлетворительная проводка направления скважины может привести к возникновению множества проблем, например, к уменьшению нормы отбора углеводородов из пласта в случае, если точка вскрытия продуктивного горизонта не достигнута, а также к избыточному трению (крутящему моменту и сопротивлению движению), если ствол скважины является не гладким, а искривленным с высокой извилистостью ствола. Поскольку время и затраты являются важными факторами при бурении, задача в технологии наклонно-направленного бурения состоит в обеспечении возможности объединения точного управления траекторией и высокой скорости проходки.
Существует несколько способов управления профилем ствола скважины во время бурения. Известна относительно новая группа систем под названием роторно-управляемые системы (РУС), общая черта которых состоит в том, что они обеспечивают направленное управление при вращении колонны. Поскольку данные системы отличаются весьма высокой сложностью и дороговизной, они имеют ограниченную долю на рынке.
Традиционный способ, применяемый в течение многих десятилетий и широко используемый и в настоящее время благодаря относительно низким затратам, состоит в турбинном (скользящем) бурении с управляемым забойным двигателем. Как следует из названия, это технология, при которой колонна не вращается, а скользит в скважину при прохождении долота через пласт. Долото приводится в действие и вращается посредством гидравлического забойного двигателя, который может представлять собой винтовой забойный двигатель или турбинный двигатель, приводимый в действие буровым раствором, прокачиваемым через бурильную колонну. Проводку направления скважины обеспечивают посредством перегиба, часто предусмотренного в корпусе двигателя. Направление перегиба и оси вращения долота, называют положением отклонителя. На вертикальном участке ствола скважины положение отклонителя определяет направление географического азимута, а на наклонном секции ствола скважины положение отклонителя отображает вектор наподобие маленькой стрелки часов с круглым циферблатом. Например, положение отклонителя, указывающее вверх (положение на 12 часов) приведет к наращиванию (увеличению) наклона без изменения азимутального направления, а положение отклонителя на 9 часов отображает простой поворот налево. Таким образом, положение отклонителя представляет собой единичный вектор, описывающий требуемое направление кривизны ствола скважины, перпендикулярное текущему тангенциальному вектору оси ствола скважины. Величина кривизны зависит от многих переменных, например, угла перегиба, расстояния от долота до перегиба, положений стабилизаторов, жесткости при изгибе компоновки низа бурильной колонны (КНБК) и даже положения отклонителя.
Турбинное бурение в большинстве случае используют с инструментом для измерений во время бурения (ИВБ), расположенным поверх и рядом с буровым двигателем. Инструмент для ИВБ измеряет, посредством акселерометров и магнитометров, угол наклона и азимутальный угол самого инструмента и угол положения отклонителя. Эти результаты измерений, как правило, передают на поверхность посредством телеметрии по гидроимпульсному каналу связи для обеспечения необходимой обратной связи инженеру-технологу по наклонно-направленному бурению, то есть, человеку, ответственному за то, чтобы ствол скважины имел траекторию, близкую к запланированной траектории. Узкая полоса пропускания, получаемая посредством телеметрии по гидроимпульсному каналу связи, обеспечивает относительно низкие скорости измерений, как правило, 1 измерение в 30 секунд.
Особая проблема при турбинном бурении заключается в реактивном скручивании колонны, создаваемом типичным крутящим моментом долота. Например, секция длиной 3000 метров стандартных 5-дюймовых бурильных труб, на которые действует типичный крутящий момент долота в 5 кН⋅м, скручивается на 2,4 поворота. Это подразумевает, что относительно небольшое изменение крутящего момента долота может вызвать значительное и нежелательное изменение положения отклонителя. Трение ствола скважины вдоль колонны будет препятствовать немедленному скручиванию, но через какое-то время, обычно через 1-30 минут, что сильно зависит от скорости проходки и длины колонны, осевое движение колонны приведет к развитию нового крутящего момента долота в колонне. Положение отклонителя, общее скручивание, и средний крутящий момент колонны асимптотически достигнут своих равновесных значений. Динамические характеристики такого реактивного скручивания будут подробно раскрыты ниже.
В настоящее время обычной является ситуация, когда после установки инженером-технологом по наклонно-направленному бурению требуемого и устойчивого положения отклонителя, он управляет положением отклонителя опосредованно, путем регулирования перепада давления. Данная технология является общеизвестной, основанной на том факте, что потеря давления на гидравлическом забойном двигателе приблизительно пропорциональна нагрузке от крутящего момента двигателя. После некоторой задержки по времени увеличение давления на гидравлическом забойном двигателе можно будет наблюдать на поверхности в виде увеличения давления насоса. Давление насоса часто измеряют на буровом стояке на буровой площадке, при этом оно приблизительно равно давлению на выходе насоса. Когда наблюдают потерю этого давления на насосе, колонну опускают для повышения нагрузки на долото и, соответственно, для повышения крутящего момента и потери давления на гидравлическом забойном двигателе. Нагрузку на долото в данном случае задают в виде механической силы сжатия между долотом и пластом, известной в буровой промышленности как «нагрузка на долото» (ННД). По аналогии, крутящий момент долота обозначает результирующий крутящий момент между долотом и пластом, который известен как «крутящий момент на долоте» (КМНД).
Существует несколько автоматических систем управления, называемых «автобурильщиками перепада давления», которые управляют движением колонны для удержания перепада давления насоса на фактически постоянном уровне, значение которого близко к заданному значению.
Основные недостатки общепринятого способа управления положением отклонителя при турбинном бурении состоят в следующем.
- Возможности для увеличения нагрузки на долото и улучшения скорости бурения очень ограничены, поскольку положение отклонителя часто имеет наивысший приоритет. Это ограничение часто приводит к неудовлетворительной общей скорости бурения, значительно меньшей скоростей бурения, полученных в режиме роторного бурения.
- Результирующая кривизна ствола скважины, полученная за счет постоянного положения отклонителя, часто превышает максимальную кривизну запланированной траектории, для обеспечения необходимого допускаемого предела регулирования. Таким образом, для того чтобы ствол скважины имел траекторию, близкую к запланированной, бурильщик должен переключаться между режимом турбинного бурения и режимом роторного бурения. В последнем случае бурильная колонна вращается с относительно высокой скоростью для сведения к нулю эффекта направленности положения отклонителя.
- Переключение между режимами турбинного бурения и роторного бурения приводит к ухудшению гладкости ствола скважины, особенно, в случае длительных интервалов переключения глубины.
- Зачастую установка правильного и устойчивого положения отклонителя в режиме турбинного бурения после выполнения сеанса турбинного бурения и после соединения при добавлении нового участка трубы к колонне требует много времени.
- Высокое и переменное осевое трение ствола скважины затрудняет управление нагрузкой на долото и крутящим моментом на долоте с поверхности. Для того чтобы избежать возникновения высоких пиковых нагрузок, которые могут привести к перегрузке и остановке гидравлического забойного двигателя, средняя нагрузка на долото должна сохраняться на относительно низком уровне, по существу, ниже ресурса долота и мощности гидравлического забойного двигателя.
В режиме роторного бурения, долото приобретает более высокую скорость, равную сумме скоростей вращения колонны и горизонтального забойного двигателя. Такая увеличенная скорость долота только частично объясняет, почему режим роторного бурения в большинстве случаев создает намного более высокие скорости проходки по сравнению с режимом турбинного бурения. Наиболее важное объяснение состоит в том, что роторное бурение обеспечивает боле высокую нагрузку на долото с лучшим управлением.
Таким образом, задача настоящего изобретения состоит в том, что устранить по меньшей мере один из недостатков известных технических решений или по меньшей мере обеспечить полезную альтернативу известным техническим решениям.
Указанная задача решена посредством признаков, раскрытых в приведенном ниже описании и в прилагаемой формуле настоящего изобретения.
Настоящее изобретение заявлено в независимых пунктах формулы. Зависимые пункты формулы раскрывают предпочтительные варианты осуществления настоящего изобретения.
Подробное раскрытие изобретения
Далее раскрывается первый способ управления направлением траектории ствола скважины во время наклонно-направленного турбинного бурения посредством бурильной колонны, имеющей буровое долото, приводимое во вращение гидравлическим забойным двигателем вокруг оси вращения бурового долота на ее нижнем конце, причем направление оси вращения бурового долота задает положение отклонителя. Указанный способ содержит следующие шаги:
а1) оценивают потерю давления на гидравлическом забойном двигателе путем измерения давления бурового раствора;
b1) используют результат оценки потери давления, полученный на шаге а1), для вычисления крутящего момента гидравлического забойного двигателя; и
с1) вычисляют угол реактивного скручивания бурильной колонны путем умножения вычисленного крутящего момента, полученного на шаге b1), на коэффициент податливости бурильной колонны при кручении, причем шаг а1) дополнительно содержит включение какого-либо переходного давления бурового раствора в указанную оценку.
Здесь и далее по тексту выражения «давление бурового раствора» и «давление насоса» означают вычисленное давление бурового раствора, обычно измеренное на выходе главных циркуляционных насосов, у бурового стояка или у верхней части колонны.
Также раскрыта система управления направлением траектории ствола скважины во время наклонно-направленного бурения, причем указанная система содержит блок управления, выполненный с возможностью осуществления раскрытого первого способа. Специалисту в данной области техники будет понятно, что такая система и любая другая система, раскрытая в настоящем документе, косвенно также будет содержать компоненты для осуществления наклонно-направленного бурения, некоторые из которых могут быть опциональными для реализации настоящего изобретения в самом широком его смысле. Такие компоненты могут включать в себя гидравлический забойный двигатель с предусмотренным перегибом, инструменты ИВП, средства перемещения бурильной колонны, например, верхний привод, консольно-выступающий с тяжелых буровых лебедок и средства для обнаружения положения и нагрузки на крюк, насосы бурового раствора и средства для измерения расхода бурового раствора, средства для обнаружения крутящего момента и углового положения бурильной колонны и т.д.
Кроме того, в настоящем документе раскрыт компьютерный программный продукт, содержащий команды для обеспечения реализации процессором первого способа, раскрытого выше. Указанный процессор может быть включен в состав блока управления, тип которого рассмотрен выше.
Также в настоящем документе раскрыт второй способ управления направлением траектории ствола скважины при наклонно-направленном турбинном бурении посредством бурильной колонны, имеющей буровое долото, приводимое во вращение гидравлическим забойным двигателем вокруг оси вращения бурового долота на его нижнем конце, причем направление оси вращения бурового долота задает положение отклонителя. При этом указанный способ содержит следующие шаги:
а2) получают данные, свидетельствующие о крутящем моменте гидравлического забойного двигателя; и
b2) вычисляют угол реактивного скручивания бурильной колонны путем умножения крутящего момента, полученного на шаге а2), на коэффициент податливости бурильной колонны при кручении, причем указанный способ дополнительно содержит шаг, на котором:
с2) вращают бурильную колонну с помощью средств вращения бурильной колонны, при этом угол, по существу, равен вычисленному углу реактивного скручивания, но имеет противоположное направление.
Кроме того, в настоящем документе раскрыта система управления направлением траектории ствола скважины во время наклонно-направленного бурения, причем указанная система содержит блок управления, выполненный с возможностью осуществления шагов раскрытого выше второго способа.
Дополнительно, в настоящем документе раскрыт компьютерный программный продукт, содержащий команды для обеспечения реализации процессором второго способа, раскрытого выше. Указанный процессор может быть включен в состав блока управления.
Также в настоящем документе раскрыт третий способ управления направлением траектории ствола скважины во время наклонно-направленного турбинного бурения посредством бурильной колонны, имеющей буровое долото, приводимое во вращение гидравлическим забойным двигателем вокруг оси вращения бурового долота на его нижнем конце, причем направление оси вращения бурового долота задает положение отклонителя. При этом указанный способ содержит шаг:
а3) на котором меняют положение отклонителя относительно заданного направления для уменьшения величины кривизны ствола скважины.
Также раскрыта система управления направлением траектории ствола скважины во время наклонно-направленного бурения, причем указанная система содержит блок управления, выполненный с возможностью осуществления шагов раскрытого выше третьего способа.
И наконец, в настоящем документе раскрыт компьютерный программный продукт, содержащий команды для обеспечения реализации процессором третьего способа, раскрытого выше. Указанный процессор может быть включен в состав блока управления.
Раскрытые выше способы можно кратко изложить следующим образом.
1. Вычисление крутящего момента гидравлического забойного двигателя по результатам измерения и улучшенная оценка давления бурового раствора на основании усовершенствованной гидродинамической модели, включающей в себя любое переходное давление и/или расходы бурового раствора и опционально также время реагирования на изменение давления бурового раствора.
2. Мгновенная, и опционально также отсроченная, компенсация скручивания бурильной колонны от верхнего привода для, по существу, противодействия скручиванию, вызванному изменением крутящего момента бурового долота для сохранения более устойчивого положения отклонителя. Компенсация скручивания может быть основана на вычисленном крутящем моменте в соответствии с первым способом, но не обязательно. Альтернативно, она также может быть основана на крутящем моменте, измеренном в скважине и переданном на поверхность, причем последняя опция является эффективной, поскольку связь при высокой пропускной способности для ИВБ, например, индуктивная связь через бурильную колонну, становится коммерчески доступной.
3. Управляемое изменение положения отклонителя вокруг заданной точки для уменьшения величины кривизны ствола скважины. Этот последний способ можно использовать в сочетании с одним или обоими из других способов, но в равной степени он может быть использован в качестве независимого способа, существенно улучшенного по сравнению с существующими на сегодняшний день способами переключения между режимами турбинного и роторного бурения.
Задача для инженера-технолога по наклонно-направленному бурению заключается в том, чтобы ствол скважины сохранял траекторию, близкую к запланированной траектории, а также в том, чтобы обеспечить максимально быстрое бурение без возможных проблем, которые могут нанести вред компонентам бурильной колонны или отрицательно повлиять на качество бурения. Эта задача может быть условно разделена на следующие две подзадачи.
- Быстрое и точное управление положением отклонителя, которое одновременно позволяет менять скорость нагнетания и/или нагрузку на долото для оптимизации скорости проходки, с использованием первого и второго способов, раскрытых выше.
- Изменение положения отклонителя так, чтобы управлять как направлением, так и величиной кривизны ствола скважины, с использованием третьего способа, раскрытого выше.
Указанные подзадачи могут быть решены путем выполнения шести шагов, раскрытых ниже в качестве предпочтительного варианта осуществления настоящего изобретения, хотя настоящее изобретение, как таковое, определено независимыми пунктами формулы изобретения. Первые пять шагов относятся к первой подзадаче, а последний шаг направлен на решение второй подзадачи. Первые четыре шага совместно описывают новую функцию управления, которая может быть задана как компенсация скручивания и рассматривается в качестве упреждающего взаимодействия. Иными словами, реактивное скручивание колонны, вычисленное по коэффициенту податливости бурильной колонны, и результат оценки крутящего момента гидравлического забойного двигателя используют для вращения верхней части колонны, чтобы реактивное вращательное движение двигателя/положения отклонителя было нейтрализовано.
Шаги, раскрытые ниже, описывают неограничивающие варианты осуществления настоящего изобретения, объединяющие все три раскрытые выше способа. Следует отметить, что три первых шага, указанных ниже, относятся к первому раскрытому способу, четвертый шаг и опционально пятый шаг относятся ко второму способу, а шестой шаг относится к третьему способу. Два или три разных способа могут быть объединены, или каждый способ может быть использован отдельно от остальных способов.
Шаги 1 и 2, приведенные ниже, являются необходимыми в том случае, если прямые измерения крутящего момента бурового долота недоступны, что на сегодняшний день является наиболее распространенной ситуацией. Однако, если данные о крутящем моменте долота доступны и получены посредством нестандартной системы ИВБ или высокоскоростной телеметрической системы с сигналопроводящими бурильными трубами, указанные ниже шаги 1 и 2 могут быть пропущены. Низкоскоростные данные о крутящем моменте в скважине также могут быть использованы совместно с надземной оценкой для обеспечения автоматической настройки модели и повышенной точности крутящего момента бурового долота.
Шаг 1: Вычисляют перепад давления на гидравлическом забойном двигателе
Данный шаг требует некоторого упрощения вычислений потери давления. В общем, более сложная и к
edrid.ru
Методы и устройства контроля траектории направленных скважин.
⇐ ПредыдущаяСтр 7 из 16Следующая ⇒
Ориентированный спуск бурильнои колонны осуществляется несколькими способами, из которых большое распространение вследствие простоты и достаточной для практической цели точности получил «метод меток», предложенный А. С. Сквпрским и И. П. Галютой. При этом методе заранее па всех муфтах и ниппелях бурильных замков при помощи специального шаблона или уровня наносят метки так, чтобы они лежали па одной образующей трубы (двухтрубки). Такую же метку наносят на образующей верхнего конца отклонителя, лежащей в плоскости действия отклоняющей силы.
Соединив отклонитель с забойным двигателем и докрепив резьбовое соединение машинными ключами, поворачивают ротор вправо до тех пор, пока метка на отклопителе не совпадет с заданным азимутом искривления Затем шаблоном сносят метку па стапипу ротора После этого отклонитель соединяют с бурильной
трубой. Так как во время свинчивания отклонитель с забойпым двигателем могли повернуться, вращением ротора совмещают метку на отклони- теле с соответствующей меткой на станине ротора.
После совмещения меток на станину ротора сносят мотку с нижнего конца навинченпои трубы и спускают бурильную колонну в скважину. Дальнейшие операции по переносу меток проводят аналогичным порядком. Отличие заключается лишь в том, что после спесения'метки с нижнего конца вновь навинченной трубы на станину ротора метка от предыдущей трубы стирается. Таким образом, на станине всегда имеется метка, соответствующая метке на отклони теле, и метка, снесенная с последней трубы, спущенной к скважину. После спуска всех труб навинчивается ведущая труба. Совместив метку на верхнем конце последней бурильной трубы с соответствующей ей меткой на станине ротора, за-мечают один из углов ведущей трубы, и па станине ротора против него делают метку. После спуска бурильной колонны вкладывают зажимы в отверстие стола ротора, вращением последнего совмещают угол ведущей трубы с соответствующей меткой па станине
и закрепляют ротор. Чтобы устранить скру-чивание колонны, которое могло образоваться во время спуска, ее несколько раз расхаживают на длину ведущей трубы при закрепленном роторе.
Забойное ориентирование отклонителя.
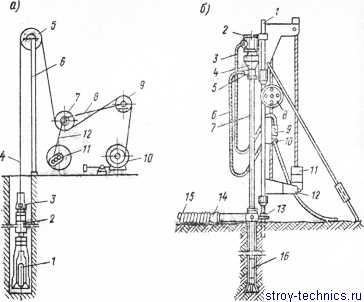
«Нож» представляет собой металлическую прямоугольную пластину с наклонно нарезанными зубцами пилообразной формы. «Ножи» устанавливают в муфте отклонителя строго параллельно плоскости его симметрии, причем наклонная часть их зубцов должна быть обращена в сторону действия отклоняющей силы. Способ В. А. Амбарцумова заключается в применении прибора, показанного на рис. 153, б.
Эксцентричный корпус 1 прибора Амбарцумова, вращаясь вокруг капатика 2, на котором прибор опускают в бурильную колонну, всегда располагается так, что канатик и образующая вершины эксцентричного корпуса находятся в плоскости искривления скважины. К нижней части прибора привнлчивается стакан 3 со свинцовым основанием 4. Со стороны, противоположной эксцентричному грузу, па образующей корпуса прибора, лежащей в плоскости его симметрии, наносится метка.
Прибор при спуске доводят до «ножей» и после постановки па них его поднимают. Приемы рас-шифровки показаний прибора Амбарцумоваana- логичны описанным выше. Только в этом случае указатель нониуса устанавливают против метки на корпусе прибора, а но шкале нониуса находят величину угла, на который требуется повернуть бурильную колонну по движению часовой стрелки для совмещения плоскости действия отклонителяс плоскостью искривления скважины.
Преимуществом прибора Амбарцумова является меньшая затрата времени на измерение, так как после постановки на «ножи» его сразуподнимают.
Метод основанный на применении забойного инклинометра.
Особенностью этого метода является возможность осуществления не только забойного ориентирования, но и замера зенитного и ази-мутального углов при условии, если над отклонителем будет установлена не стальная, а немагнитная труба длиной 5—0 м.
Забойный инклинометр (рис. 156), разработанный Р. Н. Строцким, Г. М. Раммом и Г. П. Малюгой, выполнен в виде корпуса и измери-тельной системы. Измерительная система состоит из вращающейся рамки 7, па которой находится буссоль с магнитной стрелкой 2 для измерения азимута искривления скважины, отвес 3 для измерения зенитного
угла и вспомогательный лимб 4. для определения положения отклонителя относительно направления искривления скважины или относительно меридиональной плоскости север — юг.
Вращающаяся рамка эксцентрична относительно оси вращения, поэтому она сама устанавливается в плоскости искривления скважины подобно тому, как это происходит с полуцилиндром в приборе Петросяна.
При спуске в скважипу вся измерительная система закрепляется фиксатором а. В момент посадки прибора па «ножи» на свинце 12 образуются отпечатки «ножей», нижняя часть 10 корпуса прекращает движение, тогда как верхняя часть 9 вместе с измерительной системой продолжает спускаться вппз, надвигаясь на цилиндрический груз 74, который соединен телескопически с обеими частями при помощи пальцев 15 и прорезей 16. При этом диск 6 садится па нажимной шток 7 и освобождает измерительную систему.
Освобожденная рамка инклинометра устанавливается в плоскости искривления скважины, а стрелки буссоли и отвеса занимают положения, соответствующие азимуту и углу наклона скважины в точке замера.
Нажимной шток 7 имеет специальное гидравлическое реле которое после определенной, заранее заданной и отрегулированной выдержки во времени устраняет нажатие диска. Как только диск 6 возвратится на свое место, фиксатор 5 закрепляет стрелки буссоли и отвеса в тех положениях, которые соответствуют азимуту и зенитному углу искривления в точке измерения. Для проверки правильности показаний инклинометра в стакан 77 можно вставить пробирку 13 с плавиковой кислотой и определить угол искривления и положение отклонителя подобно тому, как это делается по способу Шаньгина—Кулигина.
Средняя часть корпуса инклинометра заполнена маслом. Через компенсатор 20 гидростатическое давление столба промывочной жидкости передается на масло, вследствие чего происходит выравнивание давления внутри и снаружи прибора и достигается высокая герметичность сальника 17, штока и резьбовых соединений. Масло оказывает также демпфирующее влияние на стрелки буссоли и отвеса и используется для работы гидравлического реле времени.
В нижней части прибора имеется кольцевой лимб 18, а вдоль одной из образующих корпуса нанесена глубокая риска 21. Лимбы 4 и 18 и риска 21 позволяют связать отпечатки ножей на свинцовой печати с показаниями измерительной системы и провести ориентирование отклонителя.
Инклинометр опускается в бурильную колонну при помощи вспомогательной лебедки на тонком стальном канатике, прикрепленном к кольцу колпака 19. Замер длится 3—5 мин, если не считать времени па спуск и подъем прибора.
Подняв прибор на поверхность, снимают колпак 19 и определяют зенитный угол скважины по показанию стрелки отвеса 3, а азимут
искривления — по показанию магнитной стрелки буссоли 2. Для уточнения положения отклонителя относительно плоскости искривле-ния скважины по лимбу 4 отсчитывают угол от пуля до образующей корпуса, отмеченной риской 21. С этой образующей совмещают показание лимба 18, при этом нуль этого лимба будет совпадать с плоскостью искривления скважины.
Затем к свинцовой печати прикладывают специальный шаблон, его визирную струпу устанавливают параллельно отпечатку ножей, как это делается при использовании прибораШаньгила—Кулигина, я замеряют по лимбу угол между плоскостью искривления скважины (нуль по лимбу) и направлением отклонителя. Угол поворота рассчитывают путем вычитания угла положения отклонителя, найден-ного при помощи инклинометра, из заданной величины азимута установки его. Следует учитывать также угол компенсации от реактивного момента забойного двигателя.
16 Методы определения пространственных характеристик ствола скважины.
При бурении необходимо знать фактические координаты ствола скважины для сопоставления их с проектными. С этой целью осуществляются замеры зенитного и азимутального углов через определенные интервалы глубин (например, через 20…50 м). Эти работы проводятся обычно после бурения под кондуктор, техническую, эксплуатационную колонны.Замеры могут осуществляться еще и с целью ориентирования отклоняющихся компоновок.
Контроль траектории ствола скважины осуществляется путем непрерывного измерения азимута, зенитного угла и положения отклонителя. При этом в процессе бурения наклонно направленных скважин обеспечивается измерение зенитного угла в диапазоне 0–55°, а при горизонтальном бурении угол наклона к плоскости горизонта изменяется в пределах от –30 до +30°. Глубинная информация передается по кабелю в наземное измерительное устройство УНИ.
Графическое представление результатов измерений. Данные о положении места измерения в скважине дают в трехмерных координатах: указывается истинная вертикальная глубина, расстояние от места заложения скважины на север или на юг и расстояние от места заложения скважины на восток или запад.
Для этого необходимо знать четыре величины:
1) угол наклона;
2) направление;
3) длину хода по курсу от последней точки измерения;
4) координаты последней точки измерения. Каждая точка вычерчивается относительно предыдущей. Ошибка в любой точке переместит все наносимые точки на величину этой ошибки. Ошибка накапливается – отсюда термин «накопительная ошибка». Чтобы сделать проверку по накопительной ошибке, когда используют гироскоп многоразового действия, сервисные данные нескольких точек измерения анализируют после его извлечения из скважины. Результаты сервиса будут приняты, когда координаты последней точки (на поверхности) будут очень близки к координатам начальной точки.
Исследования, проводимые непрерывно, или инерциальные системы измерения, дают координаты точек измерения относительно начальной точки, расположенной у поверхности, и поэтому исключают накопительную ошибку, что особенно важно для скважин, требующих большой точности измерений (например, скважины на морских платформах).
Рекомендуемые страницы:
lektsia.com
Траектория - ствол - Большая Энциклопедия Нефти и Газа, статья, страница 3
Траектория - ствол
Cтраница 3
Кроме того, для управления траекторией ствола необходимо иметь на буровой от 5 - 7 до 12 - 15 ОЦЭ различного диаметра. [31]
ЗТС для контроля и управления траекторией ствола скважины включить в состав БУ, объединив его с комплексом управления технологическими параметрами режима бурения, ИИС ГТИ. [32]
Разработан и внедрен метод оперативной корректировки траектории ствола горизонтальной скважины способом периодического отбора керна. [33]
Организация работ по контролю и управлению траекторией ствола скважины в процессе ее проводки реализуется следующим образом. Забойное оборудование в виде компоновки низа бурильной колонны разрабатывается и поставляется на буровую установку в соответствии с принятой технологией бурения управлением буровых работ. [34]
В настоящее время решение проблемы управления траекторией ствола наклонной скважины на большей части его длины может быть осуществлено безориентированным регулированием зенитного угла и азимута, т.е. использованием компоновок низа бурильной колонны без отклоняющих устройств. [35]
Компьютеризированная система оперативного контроля технологии бурения и траектории ствола скважины ( КТТС) предназначена для информационного обеспечения строительства скважин специального профиля в сложных горно-геологических условиях. Разработана по заказу ОАО СпецУБР ( г. Нижневартовск) и стоят на вооружении производственных предприятий ТООРЕКОМГЕО. [36]
При выборе компоновки низа бурильного инструмента для вертикальной траектории ствола необходимо проанализировать по скважине ( или скважинам), пробуренной ранее, с использованием буровых растворов геологический разрез в выбранном интервале бурения ствола с использованием в дальнейшем газообразного агента. Это необходимо для установления влияния таких геологических факторов, как частота чередования горизонтов с различными горными породами по крепости и наличие пластов с крутыми углами падения, вызванными сбросами, сдвигами и надвигами, на возможность выполнения вертикальной траектории. Если ствол, пробуренный с промывкой жидкостью, выполнен в пределах допустимых норм, то независимо от используемых типов газообразных агентов и применяемых в сочетании с ними способов бурения компоновку низа бурильного инструмента составляют из утяжеленных бурильных труб, длина которых определяется нагрузкой на долото. [37]
Рассмотрим расчеты, связанные с корректированием параметров траектории ствола наклонной скважины, на конкретном примере. [38]
При выборе конструкций КНБК для безориентированного управления траекторией ствола скважины, с учетом влияния горногеологических и технологических факторов на ее устойчивость, к их основным технологическим параметрам следует относить не только величину отклоняющей силы на долоте Q, но и величину угла / отклонения оси долота от оси скважины. [39]
Внедрение рекомендованных компоновок бурильного инструмента для управления траекторией стволов наклонных скважин значительно повысило их качество. [40]
Данная компоновка обеспечивает ряд преимуществ: высокую точность траектории ствола, возможность оперативного управления интенсивностью искривления с поверхности, увеличение протяженности горизонтальных участков, а также при необходимости регулирование механической скорости бурения. [41]
Выбор компоновки низа бурильного инструмента зависит от вида траектории ствола в данном интервале, горно-геологических и технических условий, а также способов бурения при углублении ствола с использованием конкретного газообразного агента. Из последнего следует, что для каждого допустимого способа бурения, с помощью которого будет осуществляться процесс углубления, надо выбрать компоновку низа бурильного инструмента для обеспечения качественной проводки ствола в рассматриваемом интервале, в соответствии с запроектированным профилем. В случае равных возможностей нескольких компоновок выбирают ту, которая обеспечивает на
www.ngpedia.ru
Визуализация траектории ствола скважины и определение мест дальнометрических замеров
УРОВЕНЬ ТЕХНИКИ
[001] Данное изобретение в целом относится к скважинной дальнометрии, а более конкретно, к визуализации траекторий бурения соседних стволов скважин с использованием периодических измерений и определения местоположений, в которых выполняются дополнительные периодические измерения.
[002] Добычу углеводородов, таких как нефть и газ, как правило, осуществляют из подземных пластов, которые могут располагаться на суше или на шельфе. В некоторых случаях работы по извлечению углеводородов из подземных пластов могут включать бурение второй скважины в непосредственной близости от первого ствола скважины. В зависимости от варианта применения, стволы скважин могут пересекаться или не пересекаться. Например, в первом стволе скважины может возникнуть фонтанирование (т. е. неконтролируемый выброс углеводородов из ствола скважины), что может потребовать бурение второго разгрузочного ствола скважины, целенаправленно пересекающего первый ствол скважины на некоторой глубине. В качестве другого примера, при использовании технологии гравитационного дренирования при закачке пара (ГДЗП) необходимо пробурить два практически параллельных ствола скважины таким образом, чтобы они не пересекались. Поэтому было бы желательно во время бурения получать информацию о местоположениях двух скважин относительно друг друга. Для этого во время бурения могут выполняться периодические измерения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[003] Для более полного понимания данного изобретения, а также его отличительных признаков и преимуществ была сделана ссылка на последующее описание, которое приводится в сочетании с прилагаемыми графическими материалами, на которых:
[004] На Фиг. 1 проиллюстрирован пример буровой системы в соответствии с вариантами реализации данного изобретения;
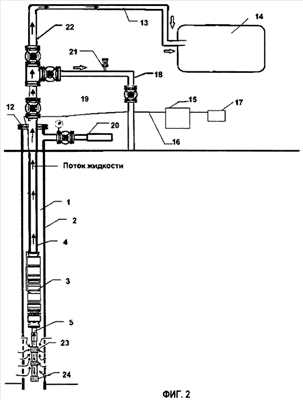
[005] На Фиг. 2 проиллюстрирована структурная схема приведенной в качестве примера вычислительной системы для использования в буровой системе, проиллюстрированной на Фиг. 1, в соответствии с вариантами реализации данного изобретения;
[006] На Фиг. 3 проиллюстрирован пример визуализации соответствующих местоположений стволов скважин, как проиллюстрировано на Фиг. 1, основанной на периодических измерениях в соответствии с вариантами реализации данного изобретения; и
[007] На Фиг. 4 проиллюстрирован пример способа определения следующего местоположения, в котором выполняют измерение дальности в соответствии с вариантами реализации данного изобретения.
[008] Несмотря на то, что варианты реализации данного изобретения были изображены и описаны, а также изложены посредством ссылки на примеры вариантов реализации изобретения, данные ссылки не ограничивают и не подразумевают такое ограничение изобретения. Раскрываемый объект изобретения допускает значительную модификацию, изменение и эквиваленты по форме и функции, что будет очевидно для специалистов в данной области техники, извлекающих пользу из данного описания. Изображенные и описанные варианты реализации данного изобретения являются примерами и не ограничивают объем изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[001] В данном описании изобретения рассмотрены системы и способы визуализации соответствующих местоположений соседних скважин в трех измерениях, основанной на измерениях, выполненных на разных глубинах. Это может быть достигнуто благодаря использованию результатов инклинометрии и/или дальнометрии. Инклинометрические измерения могут выполняться вблизи устья скважины (например, на поверхности буровой системы) и могут обеспечивать данные, которые могут способствовать определению положения ствола скважины в трех измерениях относительно пласта. Результаты инклинометрии могут быть получены от таких инструментов, как акселерометры или гироскопы, расположенных в различных местоположениях вблизи ствола скважины. С другой стороны, результаты дальнометрии могут быть приняты в одной из двух скважин и могут обеспечивать данные, которые могут помочь в определении положений двух скважин относительно друг друга. Результаты дальнометрии могут быть получены от магнитных или электромагнитных средств измерения, расположенных в различных местоположениях внутри ствола скважины.
[002] Визуализация соответствующих местоположений скважин может содержать как полученную ранее траекторию (например, основанную на полученных ранее результатах дальнометрии), так и проектируемую последующую траекторию (основанную на текущей траектории бурения). В конкретных вариантах реализации изобретения местоположение второго ствола скважины может быть определено с использованием результатов дальнометрии и/или результатов инклинометрии. Соответственно, в визуализации могут быть определены и отображены диапазоны погрешности измерений (либо результатов дальнометрии, либо инклинометрии). В некоторых вариантах реализации изобретения в визуализации для каждой проектируемой траектории ствола скважины могут быть определены и представлены показатели неопределенности (например, посредством конусов и эллипсов), основываясь на моделях неопределенности, таких как модель на основе эллипса неопределенности Вольфа и де Вардта. При использовании проектируемых траекторий, включающих определенные показатели неопределенности, могут быть определены и отображены в визуализации зоны возможного пересечения скважин. Кроме того, при использовании проектируемых траекторий могут быть определены и отображены в визуализации глубины, на которых выполняются дополнительные измерения при инклинометрических измерениях. По мере выполнения дополнительных инклинометрических измерений и/или измерений дальности могут быть обновлены каждые из определенных и/или отображенных данных (например, траектории или диапазоны погрешности).
[003] Благодаря обеспечению трехмерной визуализации и определению местоположений, в которых выполняются дополнительные дальнометрические замеры, данное изобретение в значительной степени облегчает понимание оператором бурового оборудования степени воздействия текущего направленного бурения ствола скважины на второй ствол скважины и обеспечения нового подхода к определению момента времени, когда может потребоваться выполнение еще одного дальнометрического замера. Данное изобретение также в значительной степени содействует объединению в одну визуализацию неопределенности дальнометрии и неопределенности инклинометрии. Таким образом, данное изобретение может обеспечить более точную и сжатую визуализацию соответствующих местоположений и траекторий множества смежных стволов скважин.
[004] С целью облегчения понимания данного изобретения приводятся следующие примеры некоторых из вариантов реализации изобретения. Следующие примеры не следует воспринимать в качестве ограничения или определения объема изобретения. Варианты реализации данного изобретения и их преимущества можно лучше понять со ссылкой на Фиг. 1-4, на которых одинаковые числовые обозначения используются для указания одинаковых и соответствующих элементов.
[005] На Фиг. 1 проиллюстрирована типовая буровая система 100 в соответствии с вариантами реализации данного изобретения. Буровая система 100 содержит буровую установку 101 на поверхности 111, расположенную над стволом 103 скважины, который находится в пределах подземного пласта 102. В некоторых вариантах реализации изобретения с буровой установкой 101 с помощью бурильной колонны 105 может быть соединен буровой снаряд 104. В других вариантах реализации изобретения буровой снаряд 104 может быть соединен с буровой установкой 101, например, с использованием кабеля или каната. Буровой снаряд 104 может содержать компоновку низа бурильной колонны (КНБК) 106. КНБК 106 может содержать буровое долото 109, узел управления направлением бурения 108, а также прибор для КВБ/ИВБ (каротажа во время бурения/измерения во время бурения) 107. Блок управления 110, расположенный на поверхности 111, может содержать процессор и запоминающее устройство (например, вычислительное устройство 200, проиллюстрированное на Фиг. 2) и выполнен с возможностью обмена данными с элементами компоновки низа бурильной колонны 106, расположенными в приборе для КВБ/ИВБ 107 и узле управления направлением бурения 108. Блок управления 110 выполнен с возможностью приема данных и передачи управляющих сигналов на КНБК 106. Кроме того, для тех же целей в скважине внутри КНБК 106 могут быть расположены по меньшей мере один процессор и запоминающее устройство. Прибор для КВБ/ИВБ 107 выполнен с возможностью выполнения каротажа пласта 102 как во время бурении ствола скважины 103, так и после окончания бурения ствола скважины для получения информации о текущих подземных работах. Например, прибор для КВБ/ИВБ выполнен с возможностью каротажа траектории ствола скважины 103 во время буровых работ, при этом выполняя периодические дальнометрические замеры для определения относительного местоположения ствола скважины 113 или определения одной или более характеристик пласта 102 (например, удельного электрического сопротивления пласта, твердости и/или типа). Узел управления направлением бурения 108 может содержать забойный двигатель, приводящий в действие буровое долото 109 и вращаемый во время буровых работ вместе с буровым долотом 109. Забойный двигатель может быть винтовым забойным двигателем, в котором для приведения в действие бурового долота 109 используется гидравлическая энергия бурового раствора. В соответствии с вариантом реализации данного изобретения, КНБК 106 может содержать дополнительную невращающуюся часть. Дополнительная невращающаяся часть КНБК 106 может содержать любой из компонентов КНБК 106, кроме забойного двигателя и бурового долота 109. Например, дополнительная невращающаяся часть может содержать утяжеленную бурильную трубу, прибор для КВБ/ИВБ 107, переводник долота, стабилизаторы бурильной колонны, ударные освобождающие инструменты и переводные муфты. В некоторых вариантах реализации изобретения узел управления направлением бурения 108 выполнен с возможностью отклонения бурового долота 109 для бурения под углом к стволу скважины 103. Для поддержания осевого положения бурового долота 109 относительно ствола скважины 103 может потребоваться информация об угловом положении бурового долота 109 относительно ствола скважины 103.
[006] Как проиллюстрировано на Фиг. 1, ствол скважины 103 может находиться в относительной близости к стволу скважины 113. Ствол скважины 113 может быть существующим стволом скважины для углеводородной эксплуатационной скважины или может быть стволом скважины, который пробуривают одновременно со стволом скважины 103 с помощью буровой системы, аналогичной буровой установке 101, а также ее компонентов 103-109. В конкретных вариантах реализации ствол скважины 103 может быть пробурен таким образом, чтобы он пересекался со стволом скважины 113 в определенной точке. Например, ствол скважины 113 может быть существующей скважиной, в которой наблюдается фонтанирование или другая проблема, при этом ствол скважины 103 может быть пробурен в качестве разгрузочной скважины, пересекающей ствол скважины 113. В других вариантах реализации изобретения ствол скважины 103 может быть пробурен таким образом, чтобы избежать пересечения со стволом скважины 113. Например, стволы скважин 103 и 113 могут быть сдвоенными или параллельными скважинами для использования во время бурения в технологии ГДЗП (гравитационного дренирования при закачке пара).
[007] К Фиг. 1 могут быть сделаны изменения, дополнения или опущения, не выходя за пределы объема данного изобретения. Например, на Фиг. 1 проиллюстрированы компоненты буровой системы 100 в конкретной конфигурации. Однако может использоваться любая соответствующая конфигурация компонентов буровой установки для бурения углеводородной скважины. Кроме того, хотя это не проиллюстрировано на Фиг. 1, будет очевидно, что ствол скважины 113 может содержать один или более компонентов буровой установки (например, для вариантов реализации изобретения, в которых ствол скважины 113 пробуривают одновременно со стволом скважины 103) или компонентов для извлечения углеводородов (например, для вариантов реализации изобретения, в которых ствол скважины 113 является углеводородной эксплуатационной скважиной).
[008] На Фиг. 2 проиллюстрирована структурная схема приведенной в качестве примера вычислительной системы 200 для использования в буровой системе 100, проиллюстрированной на Фиг. 1, в соответствии с вариантами реализации данного изобретения. Вычислительная система 200 или ее компоненты могут быть расположены на поверхности (например, в блоке управления 110), в скважине (например, в КНБК 106 и/или приборе для КВБ/ИВБ 107), или в некоторой комбинации обоих местоположений (например, некоторые компоненты могут быть размещены на поверхности, в то время как некоторые другие компоненты могут быть размещены в скважине, причем поверхностные компоненты соединены со скважинными компонентами с возможностью связи).
[009] Вычислительная система 200 может быть выполнена с возможностью визуализации соответствующих местоположений первого ствола скважины и соседнего второго ствола скважины, основываясь на периодических измерениях (например, результатах дальнометрии и/или инклинометрии) в соответствии с принципами данного изобретения. Например, в некоторых вариантах реализации изобретения вычислительная система 200 может быть выполнена с возможностью формирования визуализации, аналогичной визуализации 300 на Фиг. 3. Кроме того, вычислительная система 200 может быть выполнена с возможностью определения местоположения, в котором во время бурения будет выполняться следующее периодическое измерение дальности. Например, вычислительная система 200 может использоваться для реализации этапов способа, описанного ниже применительно к Фиг. 4.
[0010] В конкретных вариантах реализации изобретения вычислительная система 200 может содержать модуль скважинной дальнометрии 202. Модуль скважинной дальнометрии 202 может содержать любые соответствующие компоненты. Например, в некоторых вариантах реализации изобретения модуль скважинной дальнометрии 202 может содержать процессор 204. Процессор 204 может содержать, например, микропроцессор, микроконтроллер, цифровой сигнальный процессор (DSP), интегральную схему специального назначения (ASIC) или любую другую цифровую или аналоговую схему, выполненную с возможностью интерпретации и/или выполнения программных команд и/или обработки данных. В некоторых вариантах реализации изобретения процессор 204 может быть соединен с возможностью связи с запоминающим устройством 206. Процессор 204 может быть выполнен с возможностью интерпретации и/или выполнения программных команд или других данных, полученных и сохраненных в памяти 206. Программные команды или другие данные могут представлять собой часть программного обеспечения 208 для реализации одного или более способов, описанных в данной заявке. Запоминающее устройство 206 может содержать любую систему, устройство или прибор, выполненные с возможностью удержания и/или размещения одного или более модулей памяти; например, запоминающее устройство 206 может содержать постоянное запоминающее устройство, оперативную память, полупроводниковую память или дисковую память. Каждый модуль памяти может содержать любую систему, устройство или прибор, выполненные с возможностью хранения программных команд и/или данных в течение периода времени (например, машиночитаемый энергонезависимый носитель). Например, команды из программного обеспечения 208 могут быть получены и сохранены в памяти 206 для выполнения процессором 204.
[0011] В конкретных вариантах реализации изобретения модуль скважинной дальнометрии 202 выполнен с возможностью связи с одним или более мониторов 210 так, чтобы информация, обрабатываемая модулем скважинной дальнометрии 202 могла передаваться операторам бурового и каротажного оборудования. Например, модуль скважинной дальнометрии 202 выполнен с возможностью передачи результатов дальнометрии, инклинометрии или других измерений от прибора для КВБ/ИВБ 107 к монитору 210. В качестве другого примера, модуль скважинной дальнометрии 202 выполнен с возможностью формирования одной или более визуализаций стволов скважин и соответствующих им траекторий, аналогичных визуализации 300, проиллюстрированной на Фиг. 3.
[0012] К Фиг. 2 могут быть сделаны изменения, дополнения или опущения, не выходя за пределы объема данного изобретения. Например, на Фиг. 2 проиллюстрирована конкретная конфигурация компонентов вычислительной системы 200. Однако, может использоваться любая конфигурации компонентов. Например, компоненты вычислительной системы 200 могут быть реализованы в виде физических или логических компонентов. Кроме того, в некоторых вариантах реализации изобретения функции, связанные с компонентами вычислительной системы 200, могут быть реализованы в виде схем или компонентов для специального использования. В других вариантах реализации изобретения функции, связанные с компонентами вычислительной системы 200, могут быть реализованы в виде конфигурируемых схем или компонентов общего назначения. Например, компоненты вычислительной системы 200 могут быть реализованы посредством конфигурируемых команд компьютерной программы.
[0013] На Фиг. 3 проиллюстрирован пример визуализации 300 соответствующих местоположений стволов скважин 103 и 113 на Фиг. 1 на основании периодических измерений в соответствии с вариантами реализации данного изобретения. В частности, на Фиг. 3 проиллюстрирован перспективный вид ствола скважины 103 и ствола скважины 113 при рассмотрении двух стволов скважин сверху вниз от поверхности и с отклонением влево. В некоторых вариантах реализации изобретения оператор буровой системы во время буровых работ может вращать, масштабировать, или иным образом манипулировать визуализацией для получения любой требуемой перспективы. В некоторых вариантах реализации изобретения для облегчения понимания оператором буровой системы относительных ориентаций и положений двух скважин относительно некоторого ориентира (например, поверхности) может быть предусмотрен указатель ортогональной системы координат 301, как проиллюстрировано на Фиг. 3. Визуализация 300 содержит предыдущие траектории 311 и 321 стволов скважины 103 и 113, соответственно, а также последующие траектории 312 и 322 стволов скважины 103 и 113, соответственно. Предыдущие траектории 311 и 321 могут представлять путь соответствующих стволов скважин в пласте 102 на глубинах выше текущей глубины одного или обоих стволов скважин (например, текущей глубины 310 ствола скважины 103 или текущей глубины 320 ствола скважины 113), в то время как последующие траектории 312 и 322 могут представлять путь соответствующих стволов скважин в пласте 102 на глубинах ниже текущей глубины одного или обоих стволов скважин. Например, в вариантах реализации изобретения, в которых ствол скважины 103 должен быть разгрузочной скважиной для существующего ствола скважины 113, последующая траектория 312 ствола скважины 103 может представлять проектируемую траекторию ствола скважины 103 при текущих условиях управления направлением бурения для ствола скважины 103, в то время как последующая траектория 322 ствола скважины 113 может представлять прогнозируемый путь существующей скважины 113, основываясь на результатах инклинометрии и/или дальнометрии. В качестве другого примера, в вариантах реализации изобретения, в которых ствол скважины 103 и ствол скважины 113 пробуривают одновременно, последующая траектория 312 ствола скважины 103 может отображать проектируемый путь ствола скважины 103, основанный на измерениях, таких как инклинометрические измерения и дальнометрические замеры, в то время как последующая траектория 322 ствола скважины 113 может представлять проектируемый путь ствола скважины 113, основанный на текущих условиях управления направлением бурения и/или результатах инклинометрии или дальнометрии.
[0014] Визуализация 300 содержит три результата дальнометрии 330, выполненной из ствола скважины 310 на различных глубинах, которые могут указывать на предполагаемое расстояние между первым стволом скважины 310 и вторым стволом скважины 320. В некоторых вариантах реализации изобретения визуализация 300 может содержать указания глубин, на которых выполнялись дальнометрические замеры (не показано на Фиг. 3). Каждый из результатов дальнометрии 330 может быть связан с погрешностью дальнометрии, которая может указывать на уровень доверительной вероятности результатов дальнометрии применительно к расстоянию и/или направлению, определенным посредством дальнометрии 330. В некоторых вариантах реализации изобретения в визуализации 300 может быть указана погрешность дальнометрии (на Фиг. 3 проиллюстрирована в виде затененной части, окружающей предыдущую траекторию 321 ствола скважины 320, называемого в данной заявке окном погрешности дальнометрии 335). В конкретных вариантах реализации изобретения на основании погрешности дальнометрии могут быть определены минимальное и максимальное значения, связанные с расстоянием до второго ствола скважины из первого ствола скважины. В некоторых вариантах реализации изобретения может быть определен диапазон, связанный с направлением на второй ствол скважины из первого ствола скважины. Как проиллюстрировано на Фиг. 3, первая дуга в окне погрешности дальнометрии 335 указывает определенное минимальное расстояние до второго ствола скважины, а верхняя дуга окна погрешностей дальнометрии 335 указывает определенное максимальное расстояние до второго ствола скважины. Левая и правая стороны окна погрешности дальнометрии 335 отображают определенный диапазон погрешности определения направления до второго ствола скважины. В конкретных вариантах реализации изобретения окно погрешности дальнометрии 335 может представлять собой плоскость в пласте, через которую может проходить второй ствол скважины. Размер окна погрешности дальнометрии 335 может определяться точностью дальнометрии и может изменяться для каждого диапазона измерений, выполненных во время бурения (например, из-за различия свойств пласта на различных глубинах).
[0015] В конкретных вариантах реализации изобретения для обозначения в визуализации 300 одного или более свойств пласта ствол скважины 103 и/или ствол скважины 113 может быть затенен, окрашен или помечен иным образом. Данные указания могут помочь оператору буровой системы при определении возможных причин определенной погрешности дальнометрии. Например, первый ствол скважины 310 может быть затенен на разных глубинах, указанных в визуализации 300 для обозначения удельного электрического сопротивления пласта, типа пласта или прочности пласта. В качестве другого примера, в буровой системе для ГДЗП (гравитационного дренирования при закачке пара) первый ствол скважины 310 может быть окрашен для обозначения конкретных сегментов, в которых между первым стволом скважины 310 и вторым стволом скважины 320 имеется достаточный зазор, и/или сегментов, в которых первый ствол скважины 310 находится слишком близко ко второму стволу скважины 320, которые могут помочь оператору буровой установки должным образом выполнить управление направлением бурения ствола скважины для работ по извлечению углеводородов при ГДЗП, а также предотвратить нежелательные пересечения.
[0016] В вариантах реализации изобретения, в которых в визуализации 300 отображается окно погрешности дальнометрии 335, значения окна погрешности для промежуточных глубин могут быть определены с помощью методов интерполяции. Подразумевается, что для определения и визуализации окна погрешности дальнометрии 335 в визуализации 300 может использоваться любой подходящий способ. Например, для корректировки размера окна погрешности по сравнению с размером ствола скважины 113 наряду с методом линейного масштабирования может использоваться метод минимальной кривизны. К визуализации затем может быть добавлена трехмерная перспектива для того, чтобы предметы, расположенные дальше, казались меньше, а предметы, расположенные ближе, казались больше.
[0017] В конкретных вариантах реализации изобретения визуализация 300 также может содержать представление погрешности для последующих траекторий 312 и 322. Например, для определения диапазона погрешности в последующих траекториях 312 и 322, могут использоваться модели погрешности на основе кумулятивного эффекта результатов инклинометрии (например, модель на основе эллипса неопределенности Вольфа и де Вардта). Этот диапазон погрешности может быть проиллюстрирован на визуализации с коническим или эллиптическим затенением, как проилл
edrid.ru
ВИЗУАЛИЗАЦИЯ ТРАЕКТОРИИ СТВОЛА СКВАЖИНЫ И ОПРЕДЕЛЕНИЕ МЕСТ ДАЛЬНОМЕТРИЧЕСКИХ ЗАМЕРОВ
УРОВЕНЬ ТЕХНИКИ
[001] Данное изобретение в целом относится к скважинной дальнометрии, а более конкретно, к визуализации траекторий бурения соседних стволов скважин с использованием периодических измерений и определения местоположений, в которых выполняются дополнительные периодические измерения.
[002] Добычу углеводородов, таких как нефть и газ, как правило, осуществляют из подземных пластов, которые могут располагаться на суше или на шельфе. В некоторых случаях работы по извлечению углеводородов из подземных пластов могут включать бурение второй скважины в непосредственной близости от первого ствола скважины. В зависимости от варианта применения, стволы скважин могут пересекаться или не пересекаться. Например, в первом стволе скважины может возникнуть фонтанирование (т. е. неконтролируемый выброс углеводородов из ствола скважины), что может потребовать бурение второго разгрузочного ствола скважины, целенаправленно пересекающего первый ствол скважины на некоторой глубине. В качестве другого примера, при использовании технологии гравитационного дренирования при закачке пара (ГДЗП) необходимо пробурить два практически параллельных ствола скважины таким образом, чтобы они не пересекались. Поэтому было бы желательно во время бурения получать информацию о местоположениях двух скважин относительно друг друга. Для этого во время бурения могут выполняться периодические измерения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[003] Для более полного понимания данного изобретения, а также его отличительных признаков и преимуществ была сделана ссылка на последующее описание, которое приводится в сочетании с прилагаемыми графическими материалами, на которых:
[004] На Фиг. 1 проиллюстрирован пример буровой системы в соответствии с вариантами реализации данного изобретения;
[005] На Фиг. 2 проиллюстрирована структурная схема приведенной в качестве примера вычислительной системы для использования в буровой системе, проиллюстрированной на Фиг. 1, в соответствии с вариантами реализации данного изобретения;
[006] На Фиг. 3 проиллюстрирован пример визуализации соответствующих местоположений стволов скважин, как проиллюстрировано на Фиг. 1, основанной на периодических измерениях в соответствии с вариантами реализации данного изобретения; и
[007] На Фиг. 4 проиллюстрирован пример способа определения следующего местоположения, в котором выполняют измерение дальности в соответствии с вариантами реализации данного изобретения.
[008] Несмотря на то, что варианты реализации данного изобретения были изображены и описаны, а также изложены посредством ссылки на примеры вариантов реализации изобретения, данные ссылки не ограничивают и не подразумевают такое ограничение изобретения. Раскрываемый объект изобретения допускает значительную модификацию, изменение и эквиваленты по форме и функции, что будет очевидно для специалистов в данной области техники, извлекающих пользу из данного описания. Изображенные и описанные варианты реализации данного изобретения являются примерами и не ограничивают объем изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[001] В данном описании изобретения рассмотрены системы и способы визуализации соответствующих местоположений соседних скважин в трех измерениях, основанной на измерениях, выполненных на разных глубинах. Это может быть достигнуто благодаря использованию результатов инклинометрии и/или дальнометрии. Инклинометрические измерения могут выполняться вблизи устья скважины (например, на поверхности буровой системы) и могут обеспечивать данные, которые могут способствовать определению положения ствола скважины в трех измерениях относительно пласта. Результаты инклинометрии могут быть получены от таких инструментов, как акселерометры или гироскопы, расположенных в различных местоположениях вблизи ствола скважины. С другой стороны, результаты дальнометрии могут быть приняты в одной из двух скважин и могут обеспечивать данные, которые могут помочь в определении положений двух скважин относительно друг друга. Результаты дальнометрии могут быть получены от магнитных или электромагнитных средств измерения, расположенных в различных местоположениях внутри ствола скважины.
[002] Визуализация соответствующих местоположений скважин может содержать как полученную ранее траекторию (например, основанную на полученных ранее результатах дальнометрии), так и проектируемую последующую траекторию (основанную на текущей траектории бурения). В конкретных вариантах реализации изобретения местоположение второго ствола скважины может быть определено с использованием результатов дальнометрии и/или результатов инклинометрии. Соответственно, в визуализации могут быть определены и отображены диапазоны погрешности измерений (либо результатов дальнометрии, либо инклинометрии). В некоторых вариантах реализации изобретения в визуализации для каждой проектируемой траектории ствола скважины могут быть определены и представлены показатели неопределенности (например, посредством конусов и эллипсов), основываясь на моделях неопределенности, таких как модель на основе эллипса неопределенности Вольфа и де Вардта. При использовании проектируемых траекторий, включающих определенные показатели неопределенности, могут быть определены и отображены в визуализации зоны возможного пересечения скважин. Кроме того, при использовании проектируемых траекторий могут быть определены и отображены в визуализации глубины, на которых выполняются дополнительные измерения при инклинометрических измерениях. По мере выполнения дополнительных инклинометрических измерений и/или измерений дальности могут быть обновлены каждые из определенных и/или отображенных данных (например, траектории или диапазоны погрешности).
[003] Благодаря обеспечению трехмерной визуализации и определению местоположений, в которых выполняются дополнительные дальнометрические замеры, данное изобретение в значительной степени облегчает понимание оператором бурового оборудования степени воздействия текущего направленного бурения ствола скважины на второй ствол скважины и обеспечения нового подхода к определению момента времени, когда может потребоваться выполнение еще одного дальнометрического замера. Данное изобретение также в значительной степени содействует объединению в одну визуализацию неопределенности дальнометрии и неопределенности инклинометрии. Таким образом, данное изобретение может обеспечить более точную и сжатую визуализацию соответствующих местоположений и траекторий множества смежных стволов скважин.
[004] С целью облегчения понимания данного изобретения приводятся следующие примеры некоторых из вариантов реализации изобретения. Следующие примеры не следует воспринимать в качестве ограничения или определения объема изобретения. Варианты реализации данного изобретения и их преимущества можно лучше понять со ссылкой на Фиг. 1-4, на которых одинаковые числовые обозначения используются для указания одинаковых и соответствующих элементов.
[005] На Фиг. 1 проиллюстрирована типовая буровая система 100 в соответствии с вариантами реализации данного изобретения. Буровая система 100 содержит буровую установку 101 на поверхности 111, расположенную над стволом 103 скважины, который находится в пределах подземного пласта 102. В некоторых вариантах реализации изобретения с буровой установкой 101 с помощью бурильной колонны 105 может быть соединен буровой снаряд 104. В других вариантах реализации изобретения буровой снаряд 104 может быть соединен с буровой установкой 101, например, с использованием кабеля или каната. Буровой снаряд 104 может содержать компоновку низа бурильной колонны (КНБК) 106. КНБК 106 может содержать буровое долото 109, узел управления направлением бурения 108, а также прибор для КВБ/ИВБ (каротажа во время бурения/измерения во время бурения) 107. Блок управления 110, расположенный на поверхности 111, может содержать процессор и запоминающее устройство (например, вычислительное устройство 200, проиллюстрированное на Фиг. 2) и выполнен с возможностью обмена данными с элементами компоновки низа бурильной колонны 106, расположенными в приборе для КВБ/ИВБ 107 и узле управления направлением бурения 108. Блок управления 110 выполнен с возможностью приема данных и передачи управляющих сигналов на КНБК 106. Кроме того, для тех же целей в скважине внутри КНБК 106 могут быть расположены по меньшей мере один процессор и запоминающее устройство. Прибор для КВБ/ИВБ 107 выполнен с возможностью выполнения каротажа пласта 102 как во время бурении ствола скважины 103, так и после окончания бурения ствола скважины для получения информации о текущих подземных работах. Например, прибор для КВБ/ИВБ выполнен с возможностью каротажа траектории ствола скважины 103 во время буровых работ, при этом выполняя периодические дальнометрические замеры для определения относительного местоположения ствола скважины 113 или определения одной или более характеристик пласта 102 (например, удельного электрического сопротивления пласта, твердости и/или типа). Узел управления направлением бурения 108 может содержать забойный двигатель, приводящий в действие буровое долото 109 и вращаемый во время буровых работ вместе с буровым долотом 109. Забойный двигатель может быть винтовым забойным двигателем, в котором для приведения в действие бурового долота 109 используется гидравлическая энергия бурового раствора. В соответствии с вариантом реализации данного изобретения, КНБК 106 может содержать дополнительную невращающуюся часть. Дополнительная невращающаяся часть КНБК 106 может содержать любой из компонентов КНБК 106, кроме забойного двигателя и бурового долота 109. Например, дополнительная невращающаяся часть может содержать утяжеленную бурильную трубу, прибор для КВБ/ИВБ 107, переводник долота, стабилизаторы бурильной колонны, ударные освобождающие инструменты и переводные муфты. В некоторых вариантах реализации изобретения узел управления направлением бурения 108 выполнен с возможностью отклонения бурового долота 109 для бурения под углом к стволу скважины 103. Для поддержания осевого положения бурового долота 109 относительно ствола скважины 103 может потребоваться информация об угловом положении бурового долота 109 относительно ствола скважины 103.
[006] Как проиллюстрировано на Фиг. 1, ствол скважины 103 может находиться в относительной близости к стволу скважины 113. Ствол скважины 113 может быть существующим стволом скважины для углеводородной эксплуатационной скважины или может быть стволом скважины, который пробуривают одновременно со стволом скважины 103 с помощью буровой системы, аналогичной буровой установке 101, а также ее компонентов 103-109. В конкретных вариантах реализации ствол скважины 103 может быть пробурен таким образом, чтобы он пересекался со стволом скважины 113 в определенной точке. Например, ствол скважины 113 может быть существующей скважиной, в которой наблюдается фонтанирование или другая проблема, при этом ствол скважины 103 может быть пробурен в качестве разгрузочной скважины, пересекающей ствол скважины 113. В других вариантах реализации изобретения ствол скважины 103 может быть пробурен таким образом, чтобы избежать пересечения со стволом скважины 113. Например, стволы скважин 103 и 113 могут быть сдвоенными или параллельными скважинами для использования во время бурения в технологии ГДЗП (гравитационного дренирования при закачке пара).
[007] К Фиг. 1 могут быть сделаны изменения, дополнения или опущения, не выходя за пределы объема данного изобретения. Например, на Фиг. 1 проиллюстрированы компоненты буровой системы 100 в конкретной конфигурации. Однако может использоваться любая соответствующая конфигурация компонентов буровой установки для бурения углеводородной скважины. Кроме того, хотя это не проиллюстрировано на Фиг. 1, будет очевидно, что ствол скважины 113 может содержать один или более компонентов буровой установки (например, для вариантов реализации изобретения, в которых ствол скважины 113 пробуривают одновременно со стволом скважины 103) или компонентов для извлечения углеводородов (например, для вариантов реализации изобретения, в которых ствол скважины 113 является углеводородной эксплуатационной скважиной).
[008] На Фиг. 2 проиллюстрирована структурная схема приведенной в качестве примера вычислительной системы 200 для использования в буровой системе 100, проиллюстрированной на Фиг. 1, в соответствии с вариантами реализации данного изобретения. Вычислительная система 200 или ее компоненты могут быть расположены на поверхности (например, в блоке управления 110), в скважине (например, в КНБК 106 и/или приборе для КВБ/ИВБ 107), или в некоторой комбинации обоих местоположений (например, некоторые компоненты могут быть размещены на поверхности, в то время как некоторые другие компоненты могут быть размещены в скважине, причем поверхностные компоненты соединены со скважинными компонентами с возможностью связи).
[009] Вычислительная система 200 может быть выполнена с возможностью визуализации соответствующих местоположений первого ствола скважины и соседнего второго ствола скважины, основываясь на периодических измерениях (например, результатах дальнометрии и/или инклинометрии) в соответствии с принципами данного изобретения. Например, в некоторых вариантах реализации изобретения вычислительная система 200 может быть выполнена с возможностью формирования визуализации, аналогичной визуализации 300 на Фиг. 3. Кроме того, вычислительная система 200 может быть выполнена с возможностью определения местоположения, в котором во время бурения будет выполняться следующее периодическое измерение дальности. Например, вычислительная система 200 может использоваться для реализации этапов способа, описанного ниже применительно к Фиг. 4.
[0010] В конкретных вариантах реализации изобретения вычислительная система 200 может содержать модуль скважинной дальнометрии 202. Модуль скважинной дальнометрии 202 может содержать любые соответствующие компоненты. Например, в некоторых вариантах реализации изобретения модуль скважинной дальнометрии 202 может содержать процессор 204. Процессор 204 может содержать, например, микропроцессор, микроконтроллер, цифровой сигнальный процессор (DSP), интегральную схему специального назначения (ASIC) или любую другую цифровую или аналоговую схему, выполненную с возможностью интерпретации и/или выполнения программных команд и/или обработки данных. В некоторых вариантах реализации изобретения процессор 204 может быть соединен с возможностью связи с запоминающим устройством 206. Процессор 204 может быть выполнен с возможностью интерпретации и/или выполнения программных команд или других данных, полученных и сохраненных в памяти 206. Программные команды или другие данные могут представлять собой часть программного обеспечения 208 для реализации одного или более способов, описанных в данной заявке. Запоминающее устройство 206 может содержать любую систему, устройство или прибор, выполненные с возможностью удержания и/или размещения одного или более модулей памяти; например, запоминающее устройство 206 может содержать постоянное запоминающее устройство, оперативную память, полупроводниковую память или дисковую память. Каждый модуль памяти может содержать любую систему, устройство или прибор, выполненные с возможностью хранения программных команд и/или данных в течение периода времени (например, машиночитаемый энергонезависимый носитель). Например, команды из программного обеспечения 208 могут быть получены и сохранены в памяти 206 для выполнения процессором 204.
[0011] В конкретных вариантах реализации изобретения модуль скважинной дальнометрии 202 выполнен с возможностью связи с одним или более мониторов 210 так, чтобы информация, обрабатываемая модулем скважинной дальнометрии 202 могла передаваться операторам бурового и каротажного оборудования. Например, модуль скважинной дальнометрии 202 выполнен с возможностью передачи результатов дальнометрии, инклинометрии или других измерений от прибора для КВБ/ИВБ 107 к монитору 210. В качестве другого примера, модуль скважинной дальнометрии 202 выполнен с возможностью формирования одной или более визуализаций стволов скважин и соответствующих им траекторий, аналогичных визуализации 300, проиллюстрированной на Фиг. 3.
[0012] К Фиг. 2 могут быть сделаны изменения, дополнения или опущения, не выходя за пределы объема данного изобретения. Например, на Фиг. 2 проиллюстрирована конкретная конфигурация компонентов вычислительной системы 200. Однако, может использоваться любая конфигурации компонентов. Например, компоненты вычислительной системы 200 могут быть реализованы в виде физических или логических компонентов. Кроме того, в некоторых вариантах реализации изобретения функции, связанные с компонентами вычислительной системы 200, могут быть реализованы в виде схем или компонентов для специального использования. В других вариантах реализации изобретения функции, связанные с компонентами вычислительной системы 200, могут быть реализованы в виде конфигурируемых схем или компонентов общего назначения. Например, компоненты вычислительной системы 200 могут быть реализованы посредством конфигурируемых команд компьютерной программы.
[0013] На Фиг. 3 проиллюстрирован пример визуализации 300 соответствующих местоположений стволов скважин 103 и 113 на Фиг. 1 на основании периодических измерений в соответствии с вариантами реализации данного изобретения. В частности, на Фиг. 3 проиллюстрирован перспективный вид ствола скважины 103 и ствола скважины 113 при рассмотрении двух стволов скважин сверху вниз от поверхности и с отклонением влево. В некоторых вариантах реализации изобретения оператор буровой системы во время буровых работ может вращать, масштабировать, или иным образом манипулировать визуализацией для получения любой требуемой перспективы. В некоторых вариантах реализации изобретения для облегчения понимания оператором буровой системы относительных ориентаций и положений двух скважин относительно некоторого ориентира (например, поверхности) может быть предусмотрен указатель ортогональной системы координат 301, как проиллюстрировано на Фиг. 3. Визуализация 300 содержит предыдущие траектории 311 и 321 стволов скважины 103 и 113, соответственно, а также последующие траектории 312 и 322 стволов скважины 103 и 113, соответственно. Предыдущие траектории 311 и 321 могут представлять путь соответствующих стволов скважин в пласте 102 на глубинах выше текущей глубины одного или обоих стволов скважин (например, текущей глубины 310 ствола скважины 103 или текущей глубины 320 ствола скважины 113), в то время как последующие траектории 312 и 322 могут представлять путь соответствующих стволов скважин в пласте 102 на глубинах ниже текущей глубины одного или обоих стволов скважин. Например, в вариантах реализации изобретения, в которых ствол скважины 103 должен быть разгрузочной скважиной для существующего ствола скважины 113, последующая траектория 312 ствола скважины 103 может представлять проектируемую траекторию ствола скважины 103 при текущих условиях управления направлением бурения для ствола скважины 103, в то время как последующая траектория 322 ствола скважины 113 может представлять прогнозируемый путь существующей скважины 113, основываясь на результатах инклинометрии и/или дальнометрии. В качестве другого примера, в вариантах реализации изобретения, в которых ствол скважины 103 и ствол скважины 113 пробуривают одновременно, последующая траектория 312 ствола скважины 103 может отображать проектируемый путь ствола скважины 103, основанный на измерениях, таких как инклинометрические измерения и дальнометрические замеры, в то время как последующая траектория 322 ствола скважины 113 может представлять проектируемый путь ствола скважины 113, основанный на текущих условиях управления направлением бурения и/или результатах инклинометрии или дальнометрии.
[0014] Визуализация 300 содержит три результата дальнометрии 330, выполненной из ствола скважины 310 на различных глубинах, которые могут указывать на предполагаемое расстояние между первым стволом скважины 310 и вторым стволом скважины 320. В некоторых вариантах реализации изобретения визуализация 300 может содержать указания глубин, на которых выполнялись дальнометрические замеры (не показано на Фиг. 3). Каждый из результатов дальнометрии 330 может быть связан с погрешностью дальнометрии, которая может указывать на уровень доверительной вероятности результатов дальнометрии применительно к расстоянию и/или направлению, определенным посредством дальнометрии 330. В некоторых вариантах реализации изобретения в визуализации 300 может быть указана погрешность дальнометрии (на Фиг. 3 проиллюстрирована в виде затененной части, окружающей предыдущую траекторию 321 ствола скважины 320, называемого в данной заявке окном погрешности дальнометрии 335). В конкретных вариантах реализации изобретения на основании погрешности дальнометрии могут быть определены минимальное и максимальное значения, связанные с расстоянием до второго ствола скважины из первого ствола скважины. В некоторых вариантах реализации изобретения может быть определен диапазон, связанный с направлением на второй ствол скважины из первого ствола скважины. Как проиллюстрировано на Фиг. 3, первая дуга в окне погрешности дальнометрии 335 указывает определенное минимальное расстояние до второго ствола скважины, а верхняя дуга окна погрешностей дальнометрии 335 указывает определенное максимальное расстояние до второго ствола скважины. Левая и правая стороны окна погрешности дальнометрии 335 отображают определенный диапазон погрешности определения направления до второго ствола скважины. В конкретных вариантах реализации изобретения окно погрешности дальнометрии 335 может представлять собой плоскость в пласте, через которую может проходить второй ствол скважины. Размер окна погрешности дальнометрии 335 может определяться точностью дальнометрии и может изменяться для каждого диапазона измерений, выполненных во время бурения (например, из-за различия свойств пласта на различных глубинах).
[0015] В конкретных вариантах реализации изобретения для обозначения в визуализации 300 одного или более свойств пласта ствол скважины 103 и/или ствол скважины 113 может быть затенен, окрашен или помечен иным образом. Данные указания могут помочь оператору буровой системы при определении возможных причин определенной погрешности дальнометрии. Например, первый ствол скважины 310 может быть затенен на разных глубинах, указанных в визуализации 300 для обозначения удельного электрического сопротивления пласта, типа пласта или прочности пласта. В качестве другого примера, в буровой системе для ГДЗП (гравитационного дренирования при закачке пара) первый ствол скважины 310 может быть окрашен для обозначения конкретных сегментов, в которых между первым стволом скважины 310 и вторым стволом скважины 320 имеется достаточный зазор, и/или сегментов, в которых первый ствол скважины 310 находится слишком близко ко второму стволу скважины 320, которые могут помочь оператору буровой установки должным образом выполнить управление направлением бурения ствола скважины для работ по извлечению углеводородов при ГДЗП, а также предотвратить нежелательные пересечения.
[0016] В вариантах реализации изобретения, в которых в визуализации 300 отображается окно погрешности дальнометрии 335, значения окна погрешности для промежуточных глубин могут быть определены с помощью методов интерполяции. Подразумевается, что для определения и визуализации окна погрешности дальнометрии 335 в визуализации 300 может использоваться любой подходящий способ. Например, для корректировки размера окна погрешности по сравнению с размером ствола скважины 113 наряду с методом линейного масштабирования может использоваться метод минимальной кривизны. К визуализации затем может быть добавлена трехмерная перспектива для того, чтобы предметы, расположенные дальше, казались меньше, а предметы, расположенные ближе, казались больше.
[0017] В конкретных вариантах реализации изобретения визуализация 300 также может содержать представление погрешности для последующих траекторий 312 и 322. Например, для определения диапазона погрешности в последующих траекториях 312 и 322, могут использоваться модели погрешности на основе кумулятивного эффекта результатов инклинометрии (например, модель на основе эллипса неопределенности Вольфа и де Вардта). Этот диапазон погрешности может быть проиллюстрирован на визуализации с коническим или эллиптическим затенением, как проиллюстрировано на Фиг. 3, причем коническое затенение находится вокруг последующих траекторий 312 и 322 (называемое в данной заявке окно погрешности инклинометрии 340). В некоторых вариантах реализации изобретения окно погрешности инклинометрии 340 может начинаться с нулевой погрешности на текущих глубинах 310 и 320 и расширяться по мере увеличения глубины, как проиллюстрировано на Фиг. 3, или может начинаться со значения погрешности дальнометрии, определенного для текущих глубин 310 и 320 и расширяться от этого значения по мере увеличения глубины (например, окно погрешности инклинометрии 340 начнется в конце окна погрешности дальнометрии 335). В некоторых вариантах реализации изобретения определенные погрешность дальнометрии и погрешность инклинометрии могут быть объединены в точке перехода и вблизи нее (т. е. на глубине 320) между двумя моделями так, чтобы максимальная погрешность, определяемая для каждой в любом направлении, использовалась для представления области неопределенности (т.е., окна погрешности инклинометрии 340) от точки перехода. Например, форма окна погрешности инклинометрии 340 может переходить из сегментов кольцевой формы (как проиллюстрировано на визуализации 300 в виде окна погрешности дальнометрии 335) в сегмент эллиптической формы (как проиллюстрировано на визуализации 300 в виде окна погрешности инклинометрии 340) в интервале глубин, поскольку эллипс погрешности увеличивается в размерах относительно погрешности дальнометрии, в то время как глубина увеличивается за пределы точки перехода между погрешностью дальнометрии и погрешностью инклинометрии. В конкретных вариантах реализации изобретения визуализация 300 может дополнительно содержать представление, в котором окно погрешности инклинометрии 340 для стволов скважины 103 и 113 пересекаются (в данной заявке называется областью пересечения 345), что может указывать на потенциальную область пересечения двух стволов скважин.
[0018] В конкретных вариантах реализации изобретения визуализация 300 может обновляться по мере продолжения процесса бурения. Например, предыдущие траектории 311 и 321 и последующие траектории 312 и 32
edrid.ru
Управление траекторией ствола скважины по данным геологического мониторинга | Депрессия при бурении
В ходе буровых работ по проводке горизонтального бокового ствола в скважине специалистами отмечалось высокое качество образцов шлама, отбираемых как в процессе равновесного бурения, так и в процессе бурения на депрессии. Это обстоятельство свидетельствовало о возможности осуществления биостратиграфического мониторинга. При бурении будущих скважин управление траекториями их стволов может выполняться по данным биостратиграфического мониторинга при наличии подробного разделения геологического разреза месторождения на биозоны.
Оценка отбираемых проб при бурении на депрессии была затруднена вследствие их загрязненности поступающей из скважины нефтью. Для скважин, требующих точного соблюдения траектории, необходимо применение технологии каротажных измерений в процессе бурения.
Регулярный отбор и анализ образцов шлама в процессе бурения имеет весьма важное значение. Наиболее успешно отбор образцов осуществлялся из сепаратора песка и отстойников, как при равновесном бурении, так и при бурении на депрессии. Как уже отмечалось, отбор образцов шлама из системы фильтров оказался неэффективным. Хотя управление траекторией ствола скважины по данным биостратиграфического мониторинга возможно при бурении с применением ГТ как в равновесных условиях, так и при депрессии, тем не менее осуществление этой задачи представляется более проблематичной, чем при традиционном способе бурения скважин. Кроме того, весьма важным фактором, обусловливающим трудности в применении геологического мониторинга для управления траекторией ствола скважины, является запаздывание данных по времени при бурении с депрессией.
Добыча.
Добыча в процессе бурения.
Как уже отмечалось, при бурении в интервале 2530-3050 м из скважины поступало небольшое количество нефти. Затем при дальнейшей проводке ствола скважины до ее проектной глубины 3353 м ее дебит возрос с 48 до 175 м3/сутки. Несмотря на то, что большая часть скважины № 49 бурилась в режиме депрессии, существенные объемы углеводородов были получены только при бурении последних 305 м ее ствола. Предполагаемое пластовое давление у кровли продуктивного горизонта М 1.2 составляло 14 МПа и постепенно возрастало до 22,5 МПа. После полной потери циркуляции на глубине 2528 м скважина бурилась при противодавлении на пласт от 13 до 15 МПа. Наличие всего лишь следов углеводородов в отобранных пробах и поступление из скважины только 70% циркуляционной жидкости в интервале глубины 2530-3050 м указывали на то, что происходил уход жидкости в истощенную трещиноватую зону на глубине 2530 м. Экстраполяция кривой противодавления на пласт по отношению к дебиту скважины в процессе бурения показала установление баланса между пластом и скважиной при давлении -16 МПа.
Social Like
15rosneft.ru
Глава 2. Обоснование параметров заложения и траектории проектируемой скважины
К параметрам заложения скважины относятся координаты устья, угол наклона оси, азимут направления бурения скважины. Данные параметры устанавливаются в соответствии с геологическим заданием и схемой расположения разведочных скважин. В качестве схемы задаются разведочные профили и разведочная сеть с определенным расстоянием между скважинами. Плотность сети определяется этапом геологоразведочных работ: при поисках бурятся одиночные скважины со значительным расстоянием между ними; при детальной разведке плотность сети может быть очень значительной – 100, 50 метров. Скважины, как правило, забуривают в направлении разведочных профилей, которые ориентированы вкрест простирания рудных тел. Одним из основных элементов, который может подвергаться процессу проектирования, с учетом геологического строения месторождения является траектория ствола скважины.
2.1. Проектирование траекторий скважин
Разведочные скважины могут закладываться вертикальными, вертикальными с криволинейным интервалом (интервалами), наклонными прямолинейными, наклонными криволинейными, многоствольными и многозабойными.
Многозабойные скважины – бурение двух или более скважин одной буровой установкой последовательным спуском снаряда и углублением того или иного ствола. Каждый ствол скважины имеет устье и забой.
Куст скважин – две и более скважины, пробуренные последовательно с одной буровой площадки, как правило, с существенным смещением забоя по горизонтали от точки забуривания.
Многоствольная скважина – скважина, имеющая основной и два или более дополнительных ствола, являющихся продолжением основного. Многоствольная скважина имеет одно устье, а количество забоев равняется числу дополнительных стволов.
Скважина проектируется как вертикальная при горизонтальном или пологом залегании рудного тела. Как правило, вертикальными бывают скважины, пробуренные на угольных месторождениях, на россыпях, при разведке подземных вод, нефтяных и газовых месторождений.
Вертикальной с криволинейным заключительным интервалом скважина проектируется в том случае, если забуривание скважины под углом к горизонту менее 90 градусов невозможно из-за ограничений по углу наклона буровой вышки. Это, как правило, может наблюдаться в том случае, если проектируется глубокая (более 1 500 м) скважина.
Наклонные прямолинейные скважины проектируются вкрест простирания рудного тела, в случае если не предполагается использовать корректировку направления скважины, например, за счет естественного её искривления.
Наклонные криволинейные скважины могут проектироваться в том случае, когда планируется изменять направление скважины в процессе проходки использованием методов направленного бурения, например, искусственное или естественное искривление.
Многоствольные скважины эффективны при определенных условиях залегания рудного тела, например, при достаточно крутом залегании или когда рудное тело представляет собой группу объектов, расположенных на различной глубине. В этом случае можно произвести разведку месторождения со значительной экономией средств и времени за счет сокращения объема буровых работ.
studfile.net
траектория ствола буровой скважины - это... Что такое траектория ствола буровой скважины?
Все языкиАбхазскийАдыгейскийАфрикаансАйнский языкАканАлтайскийАрагонскийАрабскийАстурийскийАймараАзербайджанскийБашкирскийБагобоБелорусскийБолгарскийТибетскийБурятскийКаталанскийЧеченскийШорскийЧерокиШайенскогоКриЧешскийКрымскотатарскийЦерковнославянский (Старославянский)ЧувашскийВаллийскийДатскийНемецкийДолганскийГреческийАнглийскийЭсперантоИспанскийЭстонскийБаскскийЭвенкийскийПерсидскийФинскийФарерскийФранцузскийИрландскийГэльскийГуараниКлингонскийЭльзасскийИвритХиндиХорватскийВерхнелужицкийГаитянскийВенгерскийАрмянскийИндонезийскийИнупиакИнгушскийИсландскийИтальянскийЯпонскийГрузинскийКарачаевскийЧеркесскийКазахскийКхмерскийКорейскийКумыкскийКурдскийКомиКиргизскийЛатинскийЛюксембургскийСефардскийЛингалаЛитовскийЛатышскийМаньчжурскийМикенскийМокшанскийМаориМарийскийМакедонскийКомиМонгольскийМалайскийМайяЭрзянскийНидерландскийНорвежскийНауатльОрокскийНогайскийОсетинскийОсманскийПенджабскийПалиПольскийПапьяментоДревнерусский языкПортугальскийКечуаКвеньяРумынский, МолдавскийАрумынскийРусскийСанскритСеверносаамскийЯкутскийСловацкийСловенскийАлбанскийСербскийШведскийСуахилиШумерскийСилезскийТофаларскийТаджикскийТайскийТуркменскийТагальскийТурецкийТатарскийТувинскийТвиУдмурдскийУйгурскийУкраинскийУрдуУрумскийУзбекскийВьетнамскийВепсскийВарайскийЮпийскийИдишЙорубаКитайский
Все языкиАбхазскийАдыгейскийАфрикаансАйнский языкАлтайскийАрабскийАварскийАймараАзербайджанскийБашкирскийБелорусскийБолгарскийКаталанскийЧеченскийЧаморроШорскийЧерокиЧешскийКрымскотатарскийЦерковнославянский (Старославянский)ЧувашскийДатскийНемецкийГреческийАнглийскийЭсперантоИспанскийЭстонскийБаскскийЭвенкийскийПерсидскийФинскийФарерскийФранцузскийИрландскийГалисийскийКлингонскийЭльзасскийИвритХиндиХорватскийГаитянскийВенгерскийАрмянскийИндонезийскийИнгушскийИсландскийИтальянскийИжорскийЯпонскийЛожбанГрузинскийКарачаевскийКазахскийКхмерскийКорейскийКумыкскийКурдскийЛатинскийЛингалаЛитовскийЛатышскийМокшанскийМаориМарийскийМакедонскийМонгольскийМалайскийМальтийскийМайяЭрзянскийНидерландскийНорвежскийОсетинскийПенджабскийПалиПольскийПапьяментоДревнерусский языкПуштуПортугальскийКечуаКвеньяРумынский, МолдавскийРусскийЯкутскийСловацкийСловенскийАлбанскийСербскийШведскийСуахилиТамильскийТаджикскийТайскийТуркменскийТагальскийТурецкийТатарскийУдмурдскийУйгурскийУкраинскийУрдуУрумскийУзбекскийВодскийВьетнамскийВепсскийИдишЙорубаКитайский
technical_translator_dictionary.academic.ru